

Dexterous hand of robot
A dexterous hand and robot technology, applied in the field of robotics, can solve problems such as high cost of dexterous hands, low grasping stability, and inability to achieve independent rotation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Specific examples of the present invention are given below. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the claims of the present application.
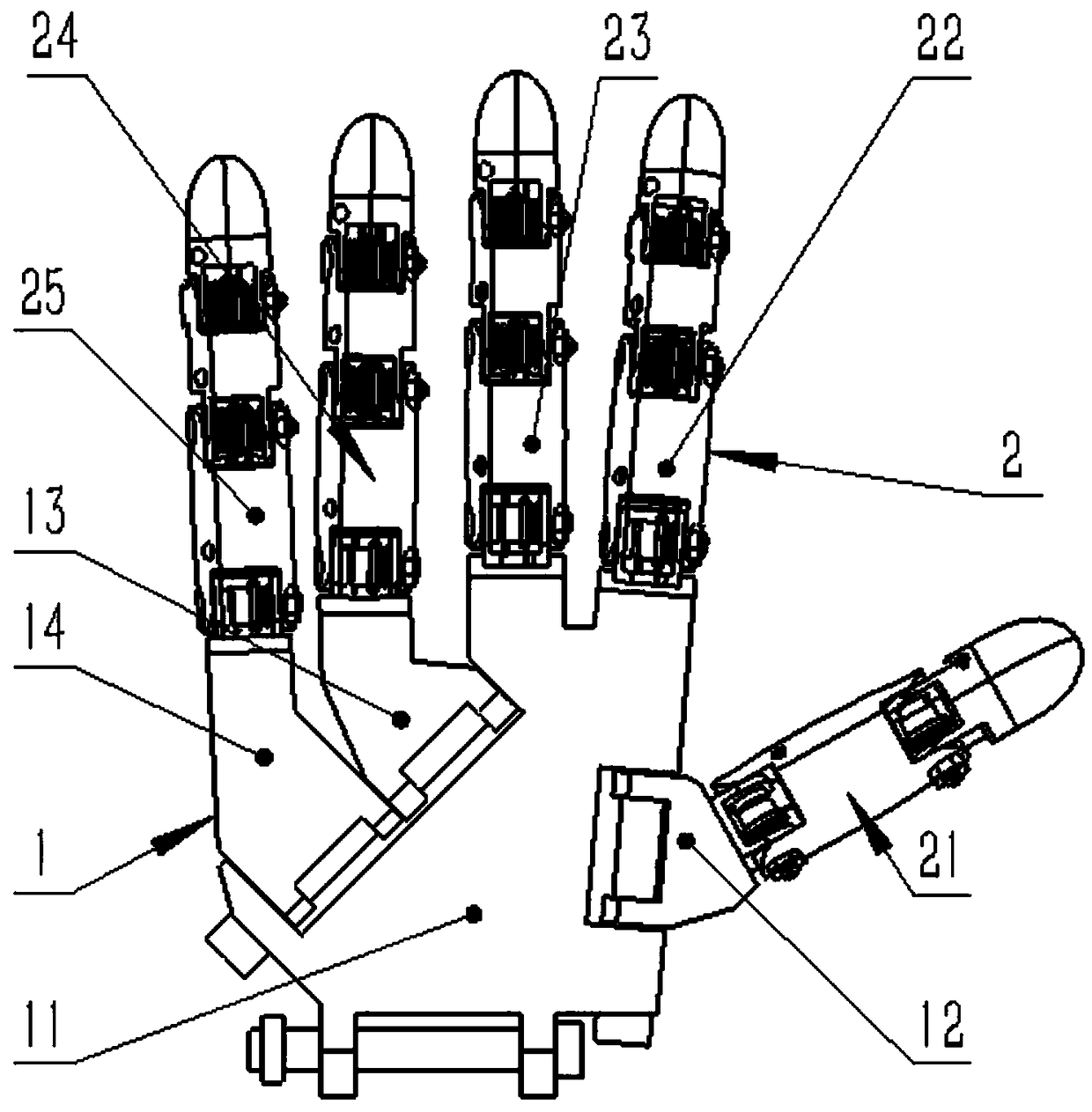
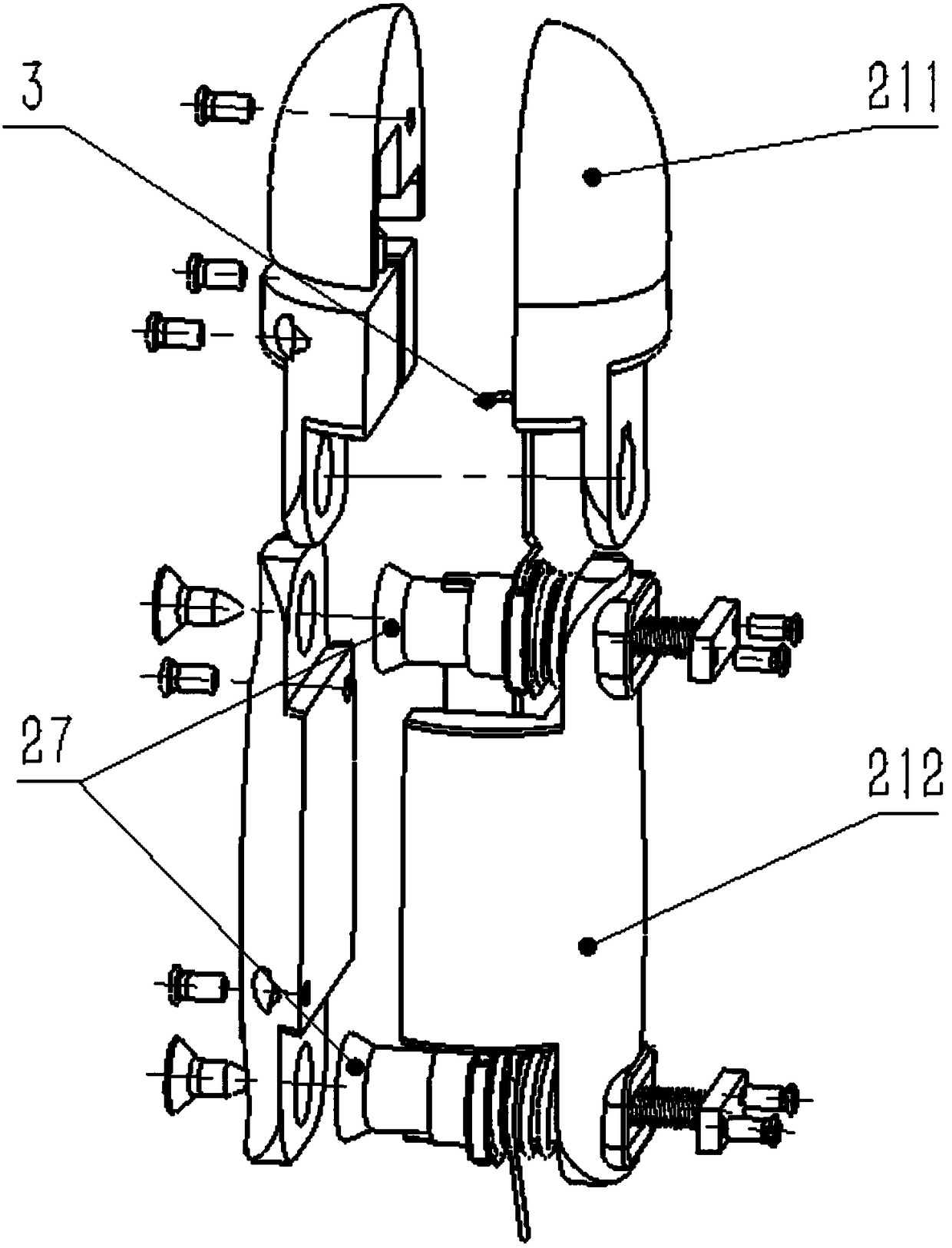
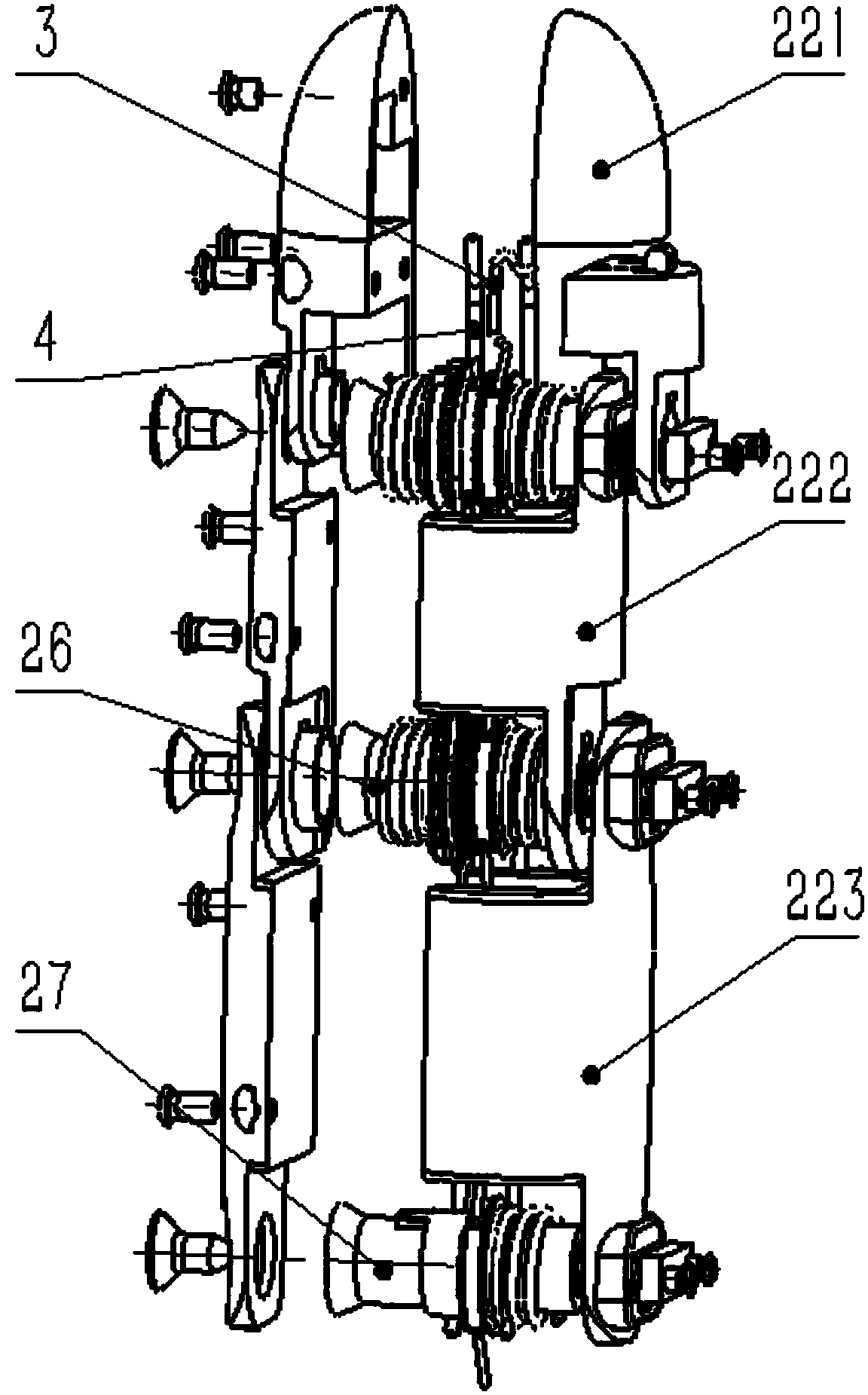
[0023] The present invention provides a robotic dexterous hand, comprising a palm 1, fingers 2, tendon cords 3, and elastic cords 4, the palm 1 comprising a base 11, a thumb connecting joint 12, a ring finger connecting joint 13, and a little finger connecting joint 14; Thumb connecting joint 12, ring finger connecting joint 13, and little finger connecting joint 14 all have circular mounting holes, which are connected to the base 11 through the rotating shaft, and can rotate around the rotating shaft at a limited angle (limited by shape and structure);
[0024] Described finger 2 comprises thumb 21, forefinger 22, middle finger 23, ring finger 24, little finger 25, coupling fastening part 26, non-coupling fastening part 27, tensioner 28; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More