

Under-actuated manipulator based on metamorphic principle
An underactuated and manipulator technology, applied in the field of robotics, can solve the problems of too many driving components, difficult to manufacture, complex structure, etc., and achieve the effect of high flexibility, low cost and few driving components
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to better explain the present invention and facilitate understanding, the present invention will be described in detail below through specific embodiments in conjunction with the accompanying drawings.
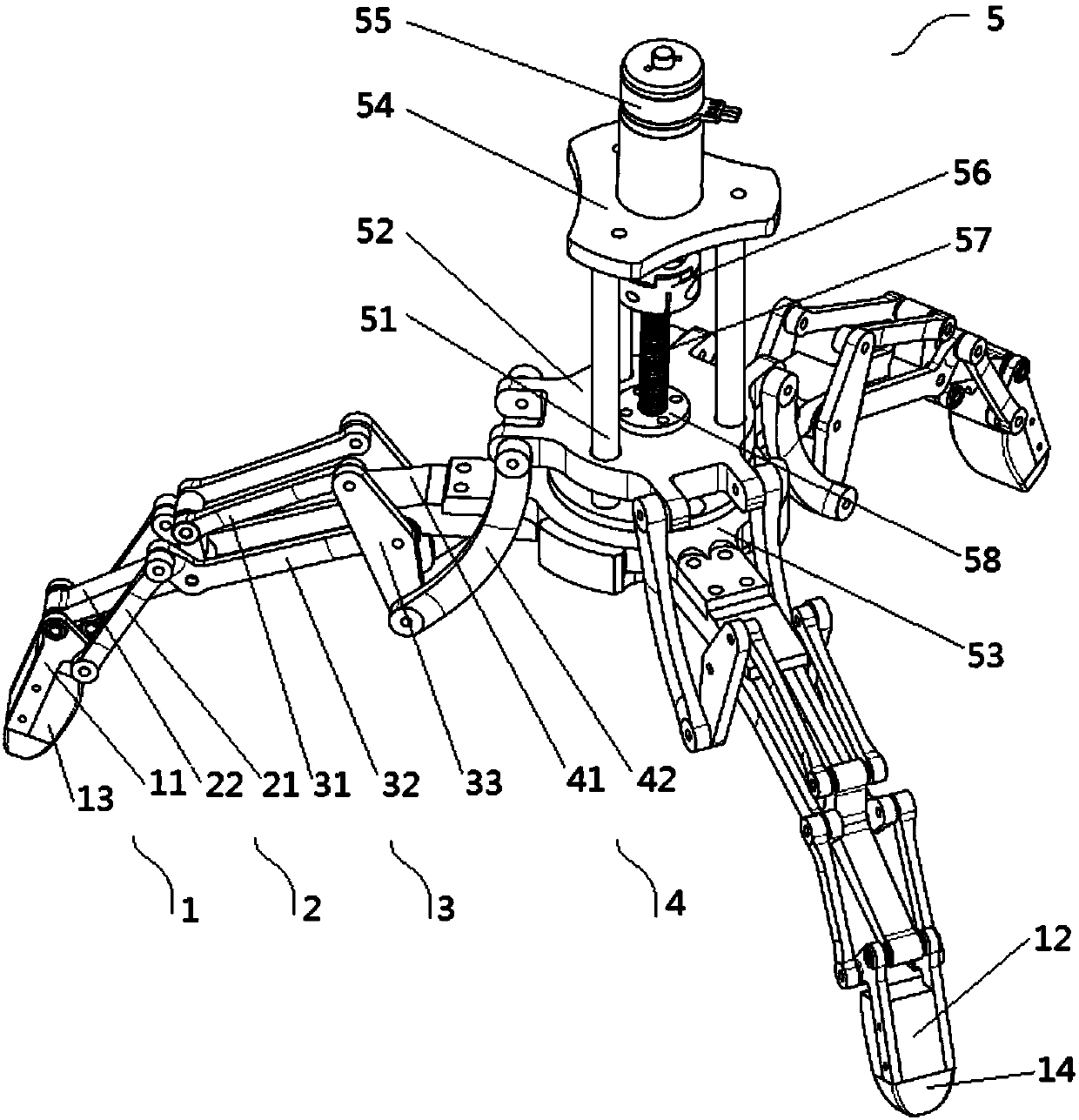
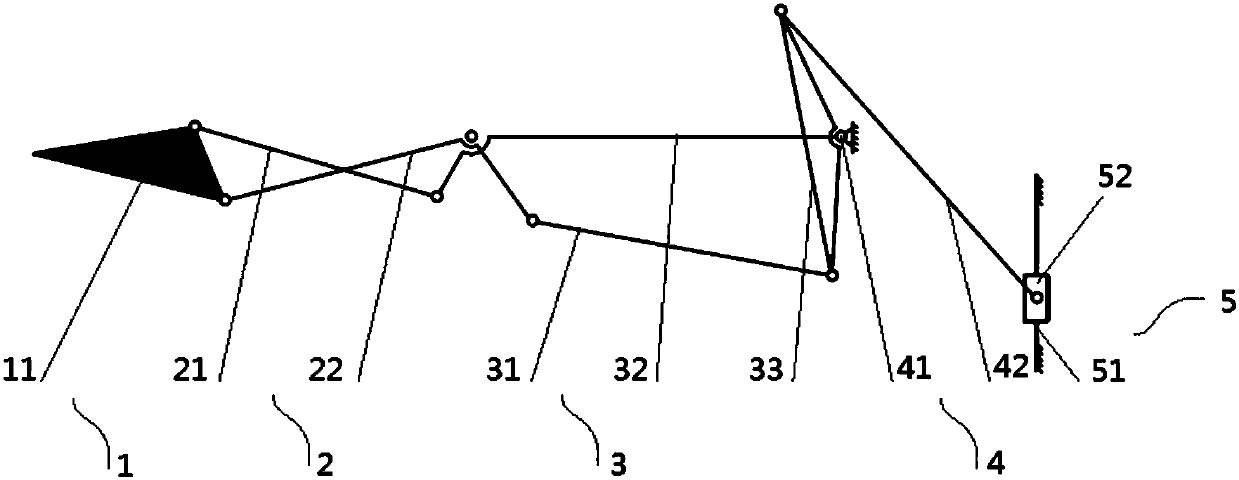
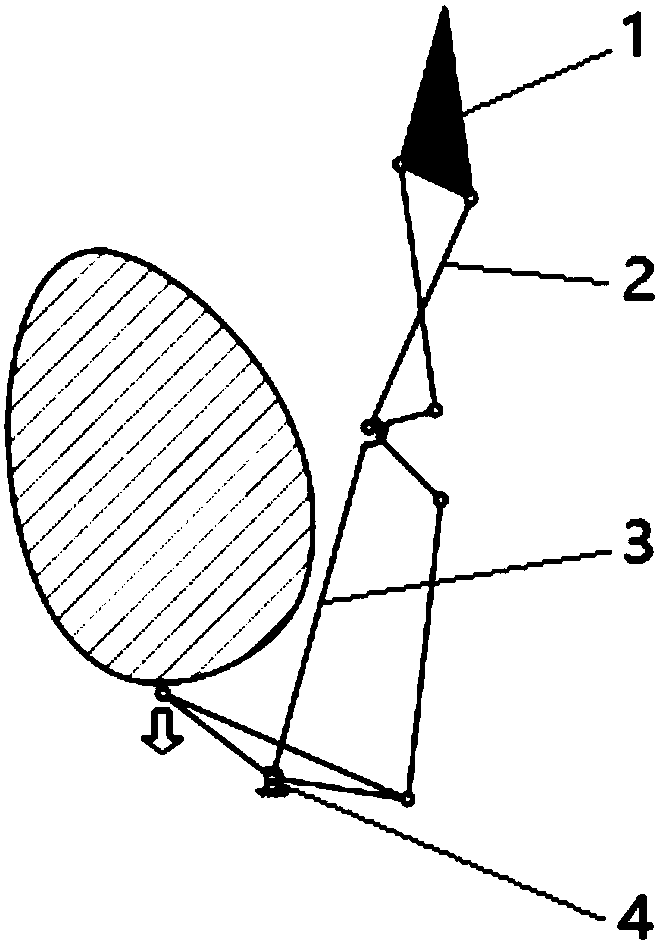
[0054] refer to figure 1 , the present embodiment provides an underactuated manipulator based on the metamorphic principle, the manipulator includes at least two mechanical fingers and a driving part 5, wherein the mechanical finger includes four parts, respectively fingertip part 1, little finger part 2, middle finger Part 3 and root part 4, fingertip part 1, little finger part 2, middle finger part 3 and finger root part 4 are hinged to each other. What needs to be explained here is that the connection sequence of fingertip part 1, little finger part 2, middle finger part 3 and finger base part 4 mentioned here is connected in the order of fingertip, little finger, middle finger and finger root in human fingers. of.
[0055] Drive part 5 comprises palm fram...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More