

Mechanical simulated hand with multi-degree of freedom
A degree of freedom, bionic hand technology, applied in the field of manipulators and multi-degree-of-freedom machine bionic hands, can solve problems such as bloat and redundancy, and achieve the effect of flexible control, simple and easy technical means, and enriching the ability of finger movement.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
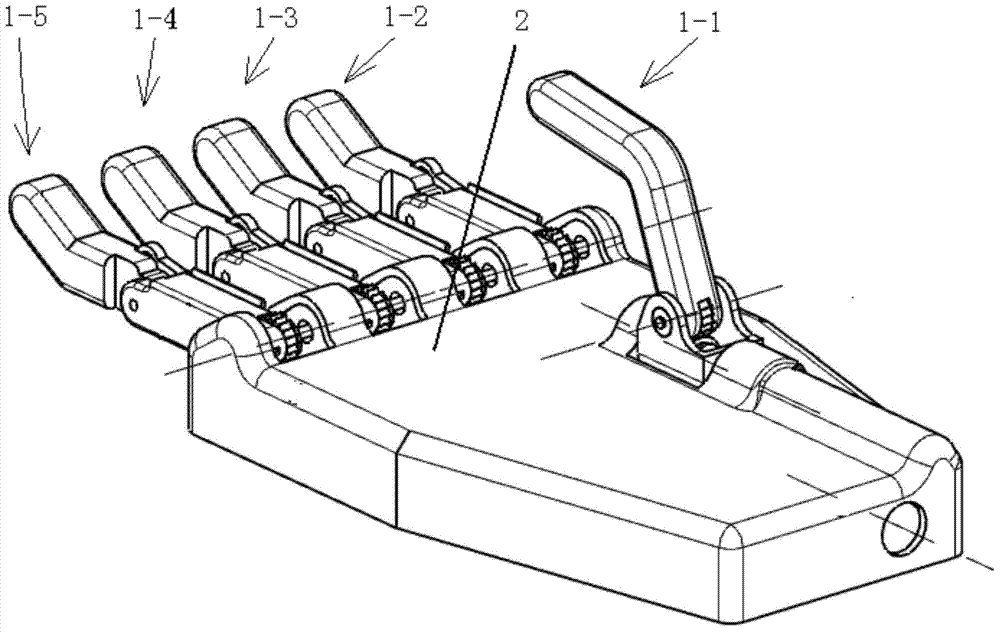
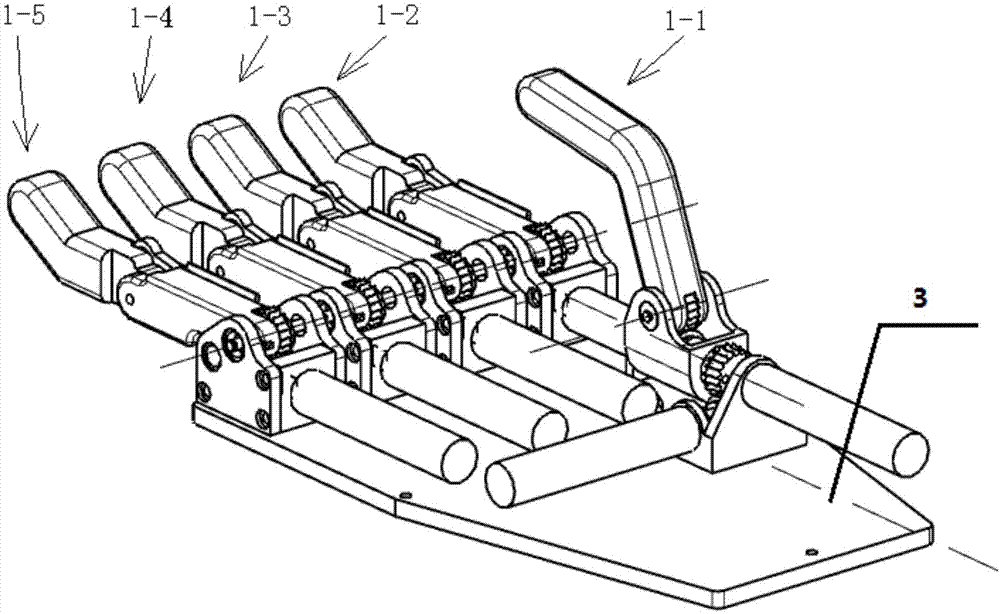
[0034] Such as figure 1 , figure 2 shown. The multi-degree-of-freedom robotic bionic hand of the present invention includes a robotic palm base 3 and five fingers connected to the robotic palm base 3, and these five fingers sequentially include thumb 1-1, index finger 1-2, middle finger 1-3, and ring finger 1- 4. Little fingers 1-5; the exterior of the robot palm base 3 is covered with a shell 2, which is used to cover the internal motor and transmission components.
[0035] The four fingers of index finger 1-2, middle finger 1-3, ring finger 1-4 and little finger 1-5 have the same structure, and each finger has two degrees of freedom of flexion and extension.
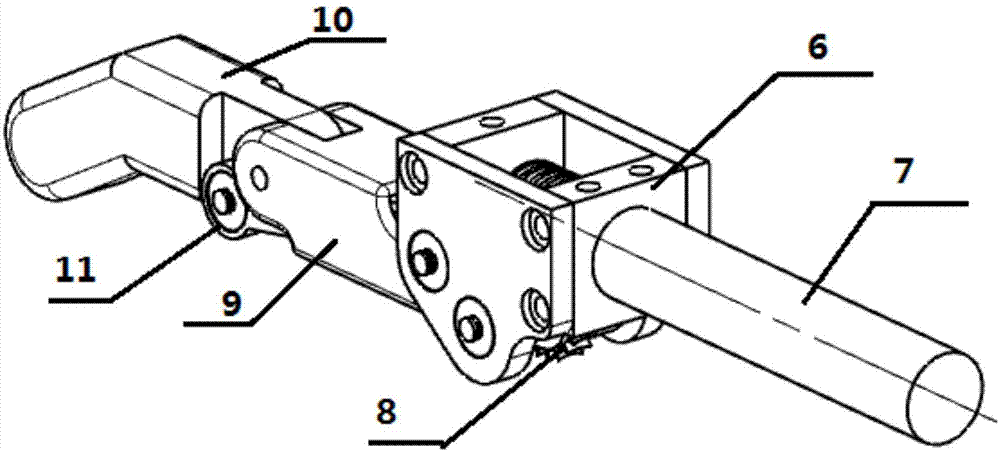
[0036] Such as image 3 , Figure 4 shown. Each finger in these four fingers comprises a housing 6 , a root 9 , a fingertip 10 , and a transmission link 11 on which a motor 7 and a transmission worm gear 8 are installed.
[0037] Such as image 3 , Figure 4 shown. One end of the transmission worm gear 8 is c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More