

Underactuation human-simulation dexterous hand driven and controlled through micro-motor
A drive control and micro-motor technology, applied in the field of dexterous hands, can solve the problems of unfavorable popularization and practicality of dexterous hands, many driving units, complicated mechanisms, etc., and achieve the effect of reducing the design of the driven mechanism, small size, and simplifying the structure of fingers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
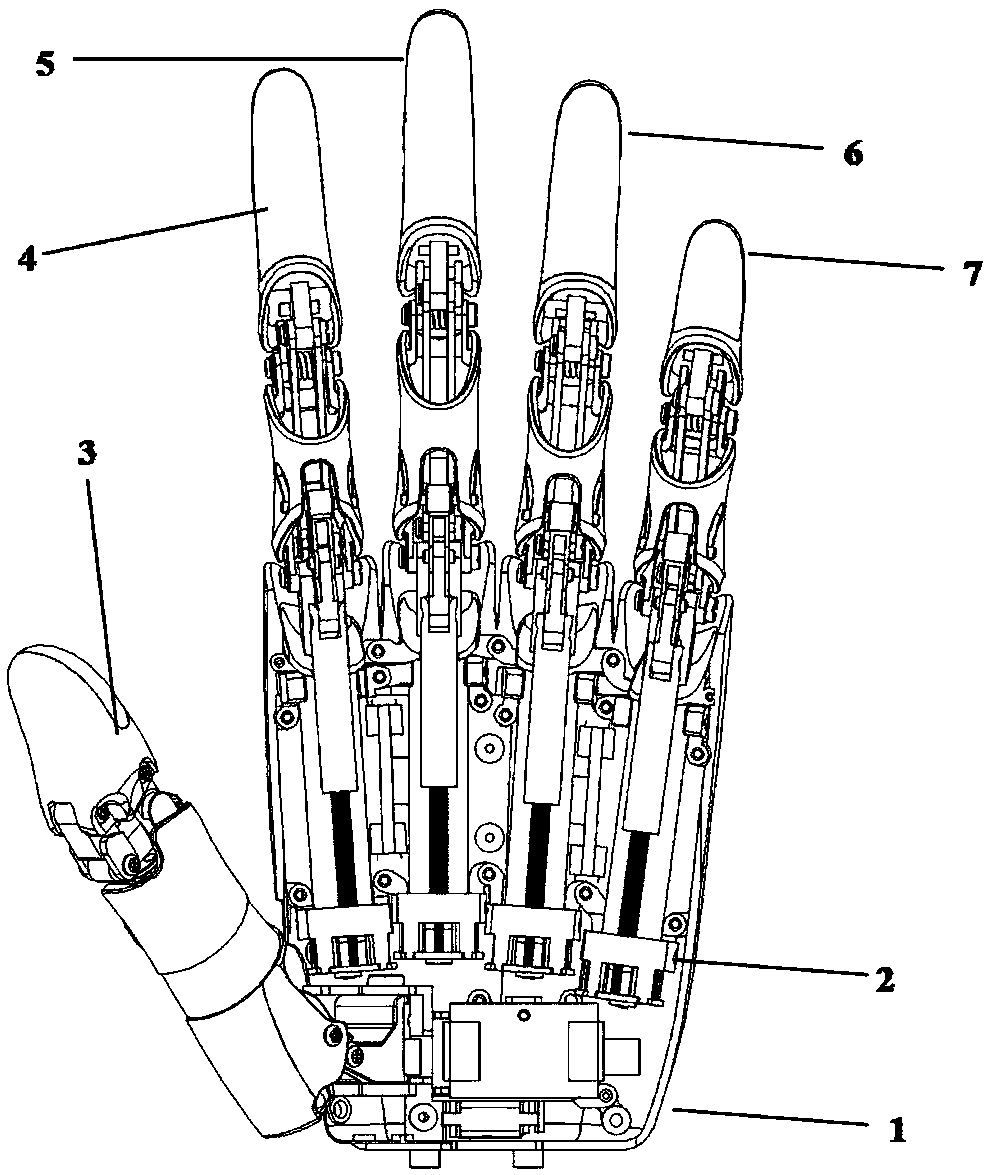
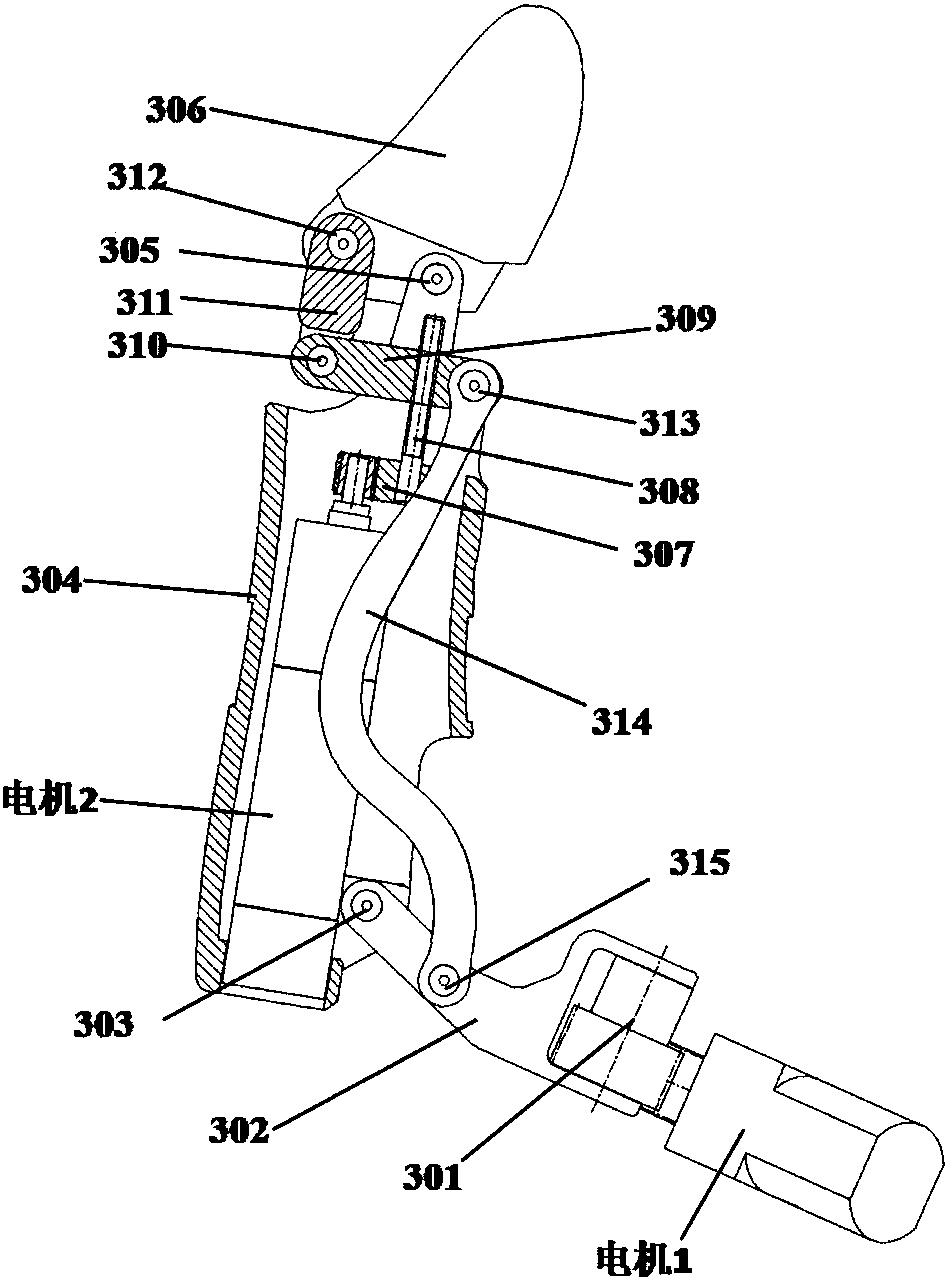
[0020] see figure 1 , 2 , in an embodiment of the present invention, an underactuated humanoid dexterous hand driven and controlled by a micro-motor includes a palm shell 1, a motor 2, a thumb 3, an index finger 4, a middle finger 5, a ring finger 6, and a little finger 7; it is characterized in that the The thumb is divided into thumb knuckle 302, thumb middle knuckle 304, thumb distal knuckle 306, thumb base joint 301, thumb middle knuckle 303 and thumb far...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More