

A Decision-Making Method for UAV Air Combat Maneuver Based on Reinforcement Learning
A technology of reinforcement learning and decision-making methods, applied in non-electric variable control, instruments, three-dimensional position/course control, etc., can solve problems such as difficult air combat mission situation space, difficult to calculate maneuvering action decision-making, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
[0044] The present invention completes the establishment of the entire reinforcement learning maneuvering decision-making algorithm from two aspects of state space description and environment modeling, and the main work includes the following contents:
[0045] 1) The division and description of the state space, using the fuzzy method to fuzzify each state in the air combat situation, as the state input of reinforcement learning.
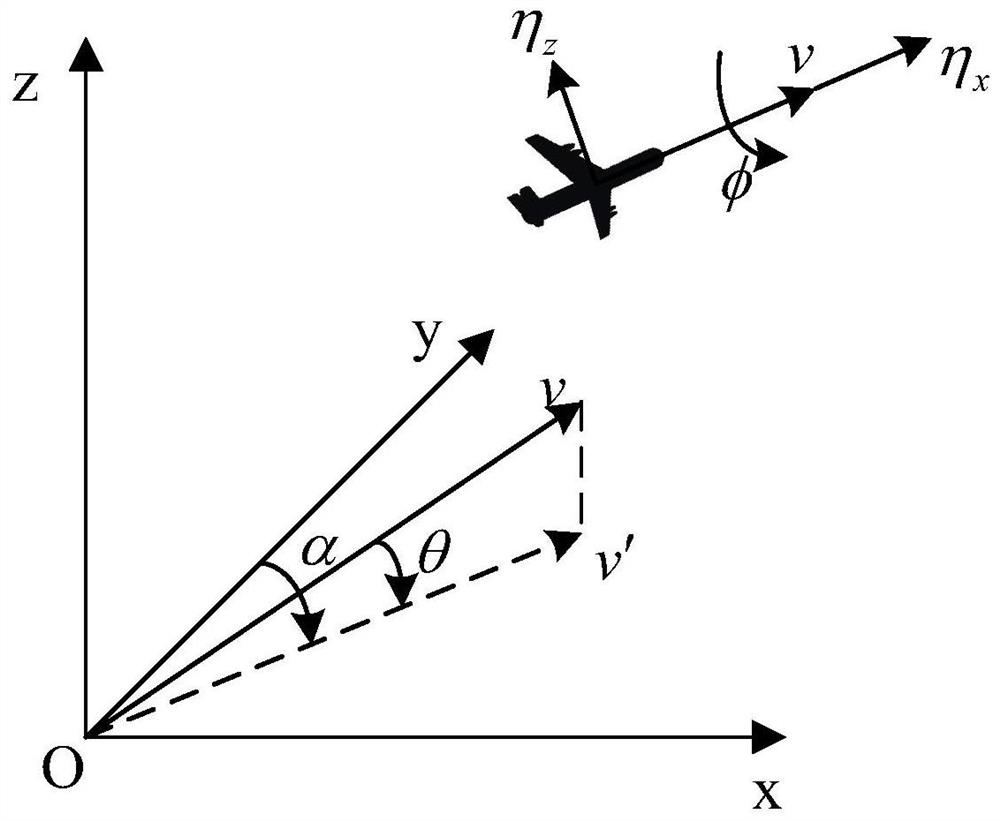
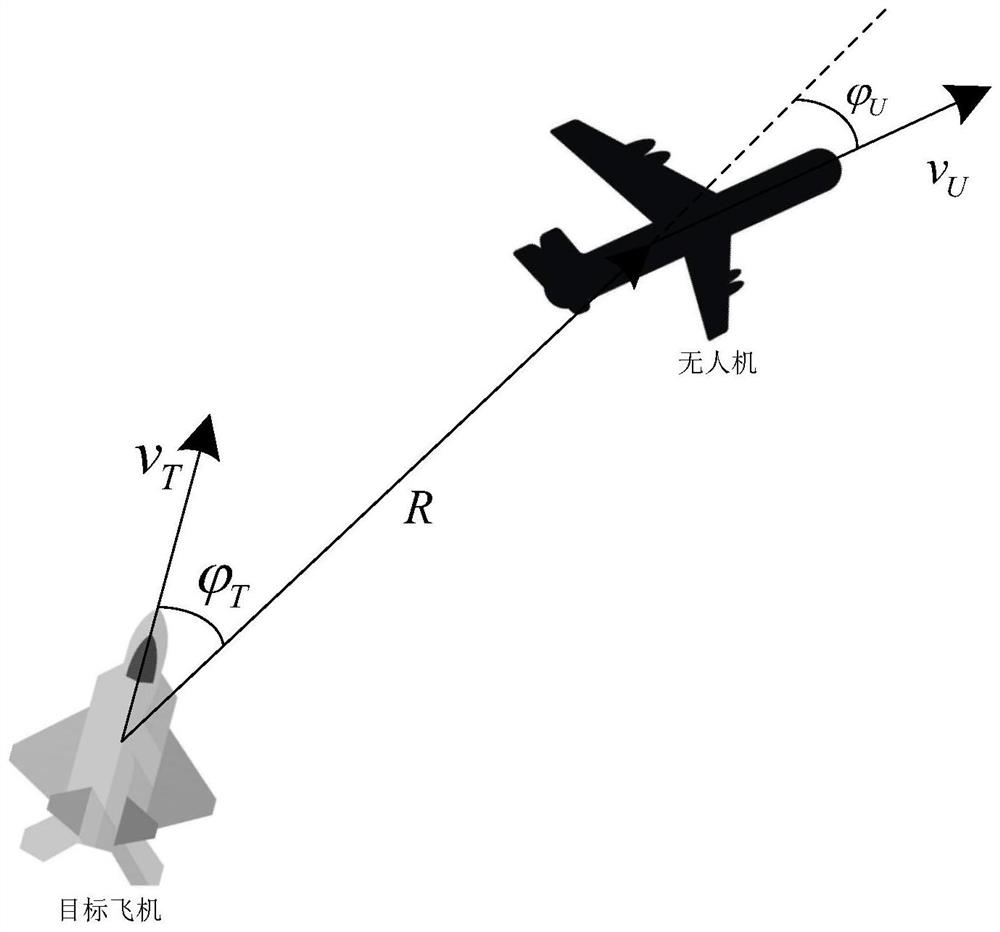
[0046] 2) The construction of the reinforcement learning environment in the air combat process, constructing the motion control model of the UAV, clarifying the action space and state transition function of the reinforcement learning, and constructing the air combat advantage function based on various elements of the air combat situation, as the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More