

Multi-sensor data fusion obstacle detection method for power line inspection unmanned aerial vehicle
An obstacle detection and data fusion technology, applied in the field of UAV obstacle detection, can solve the problems of low GPS accuracy, single obstacle detection sensor, no learning function, etc., to ensure accuracy and good obstacle avoidance effect. , the effect of improving the recognition accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further introduced below in conjunction with the accompanying drawings and specific embodiments.
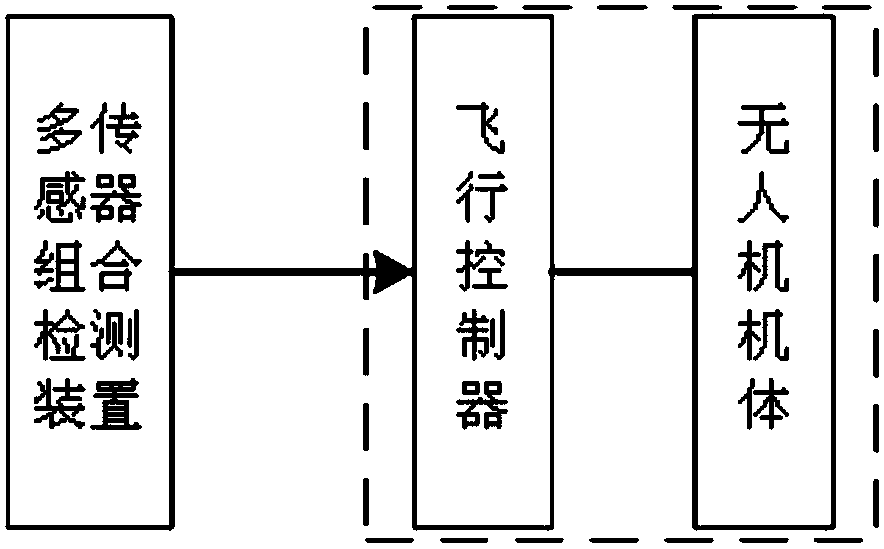
[0038] figure 1 It is a connection block diagram of the multi-sensor combination obstacle detection device and the UAV system described in this embodiment, mainly including two parts: the multi-sensor combination detection device and the UAV system. The dotted box is the UAV system, including two main parts of the flight controller and the UAV body. The multi-sensor combination detection device is physically connected with the flight controller in the UAV system.
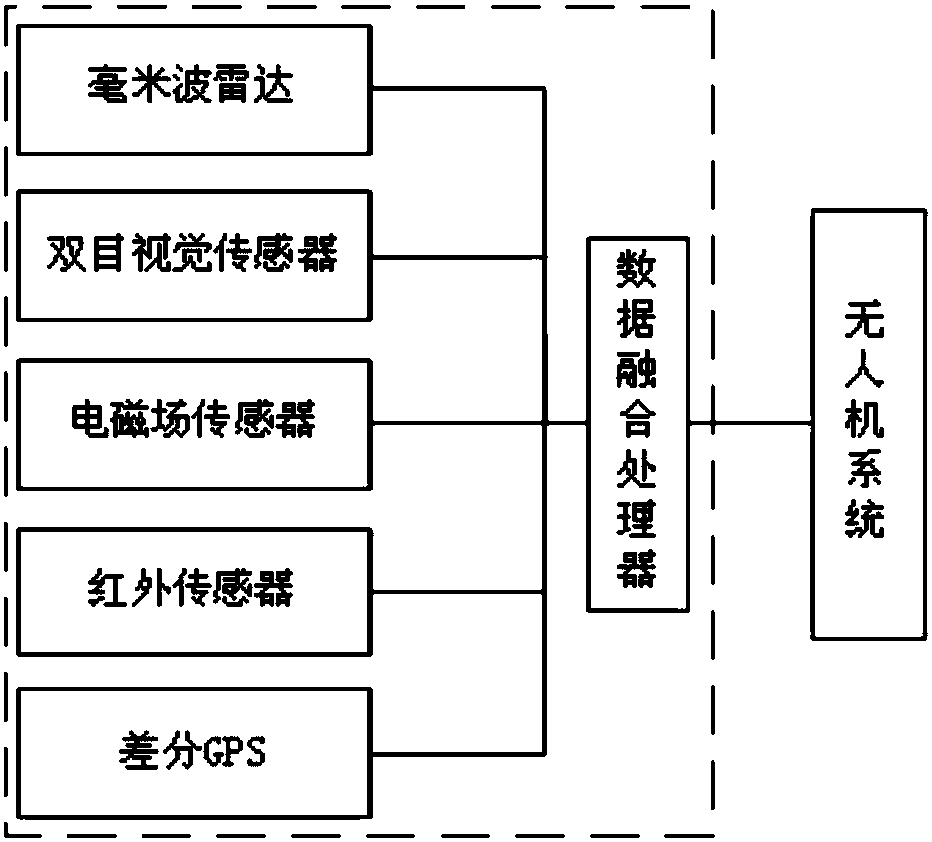
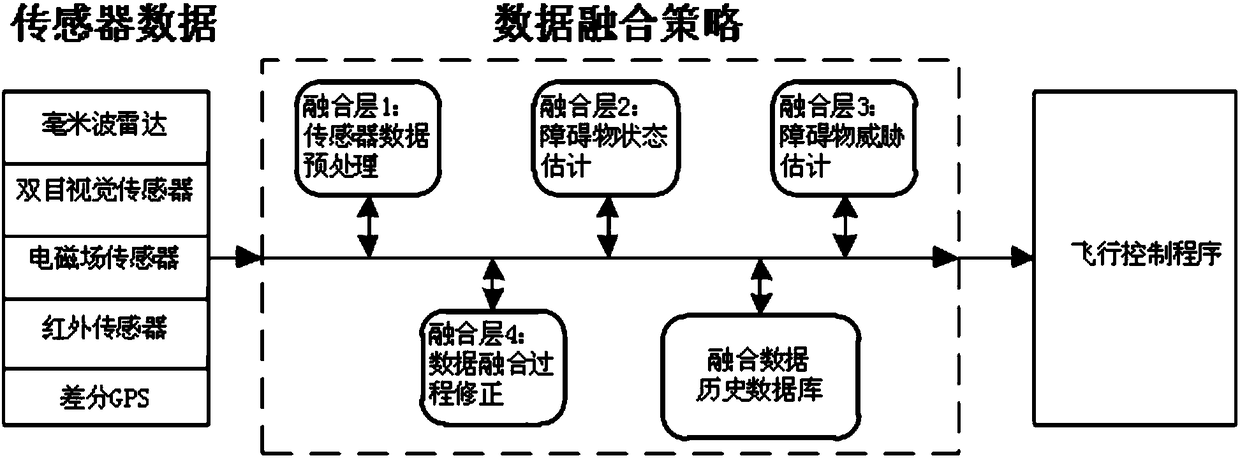
[0039] Such as Figure 1-Figure 4 As shown, a multi-sensor data fusion obstacle detection method of electric line patrol UAV is characterized in that: it includes a multi-sensor combined detection device connected with the flight controller in the UAV system, and the multi-sensor combined detection device includes mm Wave radar, binocular vision sensor, electromagnetic field sens...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More