Omnidirectional totally driven mobile robot chassis with independent suspensions
A mobile robot and independent suspension technology, applied in the field of robotics, can solve the problems of large wear, high price, and inappropriateness of the mecanum wheel, and achieve the effect of reducing vibration, reducing space size, and facilitating disassembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The embodiments of the present invention will be described in detail below with reference to the accompanying drawings, but the present invention can be implemented in many different ways defined and covered by the claims.
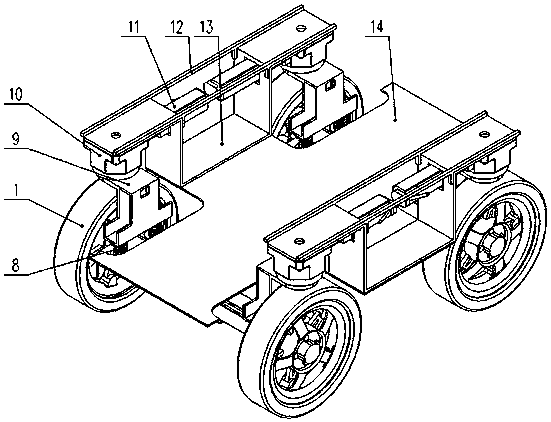
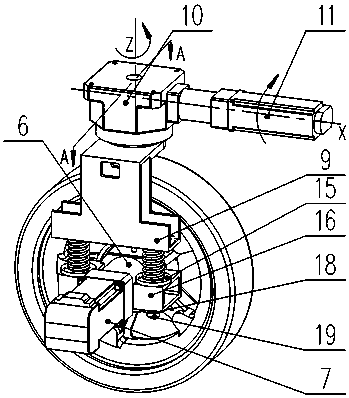
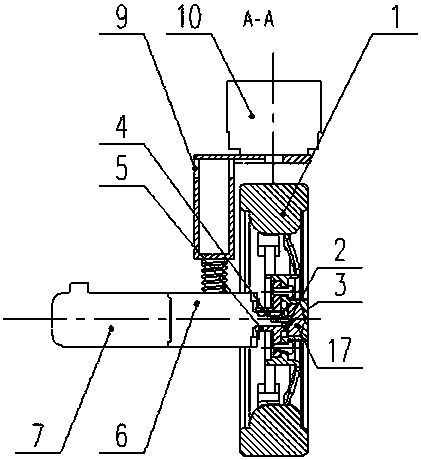
[0026] Such as Figure 1-3 As shown, an omnidirectional all-wheel drive mobile robot chassis with independent suspension includes a plurality of omnidirectional all-drive modules, a base plate 14, and two U-shaped plates 13 fixedly connected to both sides of the base plate 14 respectively. The modules are installed on the U-shaped board 13, and each omnidirectional all-drive module includes a RR rotating platform 10, an independent suspension, a wheel 1 and a first power unit for driving the wheel 1 to rotate along the wheel axis, and the RR rotating platform 10 is controlled by the second The power unit is driven and can rotate around the Z axis. The upper part of the independent suspension is fixed on the lower end of the RR rotating platform 10, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com