

Cloud robot collaborative learning method based on hybrid enhanced intelligence
A collaborative learning and robot technology, applied in the field of human-computer interaction, can solve problems such as not being able to train new tasks, and achieve the effect of shortening the learning time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the objectives, technical solutions and advantages of the present invention clearer, the technical solutions of the present invention will be described in detail below with reference to the accompanying drawings and embodiments.
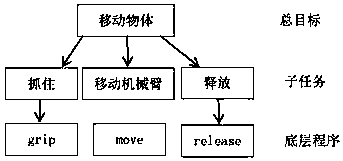
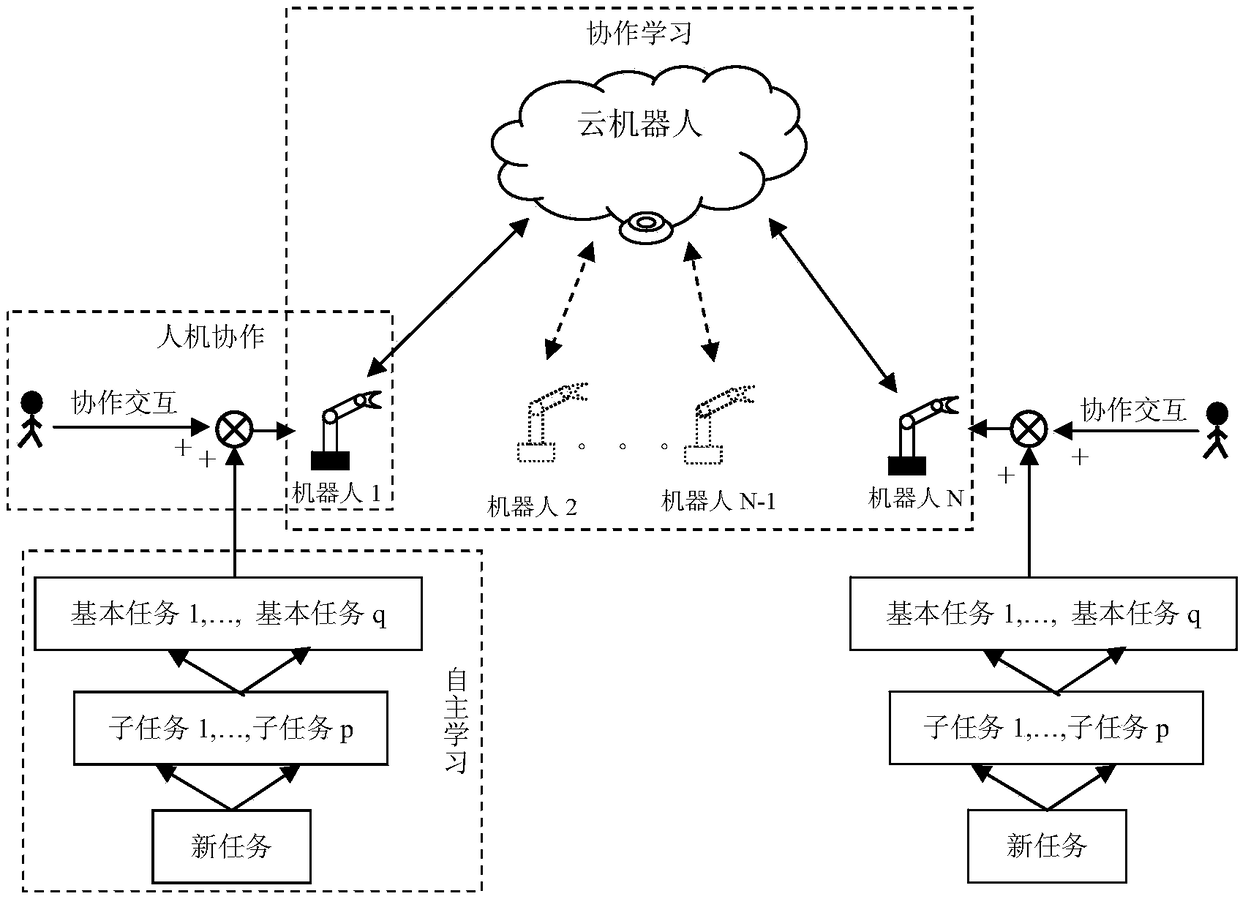
[0021] A cloud robot collaborative learning method based on hybrid enhanced intelligence of the present invention, based on NTP and the human-machine collaboration service framework of cloud robots, realizes the use of multiple robots to learn common skills together. Robots learn mobility skills from experience, share skills from other robots, and learn skills through human assistance. In this framework, it is mainly composed of four parts: cloud robot, local robot, teaching learning and task understanding based on NTP (Neural Task Programming). A local robot is composed of N mutually independent robots. Cloud robot refers to an academic concept of how robot information is stored and acquired, which aggregates and shares dece...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More