

Method for controlling yaw stability of multi-wheel independent drive electric vehicle during steering
An electric vehicle, independent drive technology, applied in the direction of electric steering mechanism, power steering mechanism, steering mechanism, etc., can solve the problem of unsatisfactory yaw stability control of multi-wheel independently driven electric vehicles, and achieve vehicle yaw stability The effect of control, strong reliability and guaranteed stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
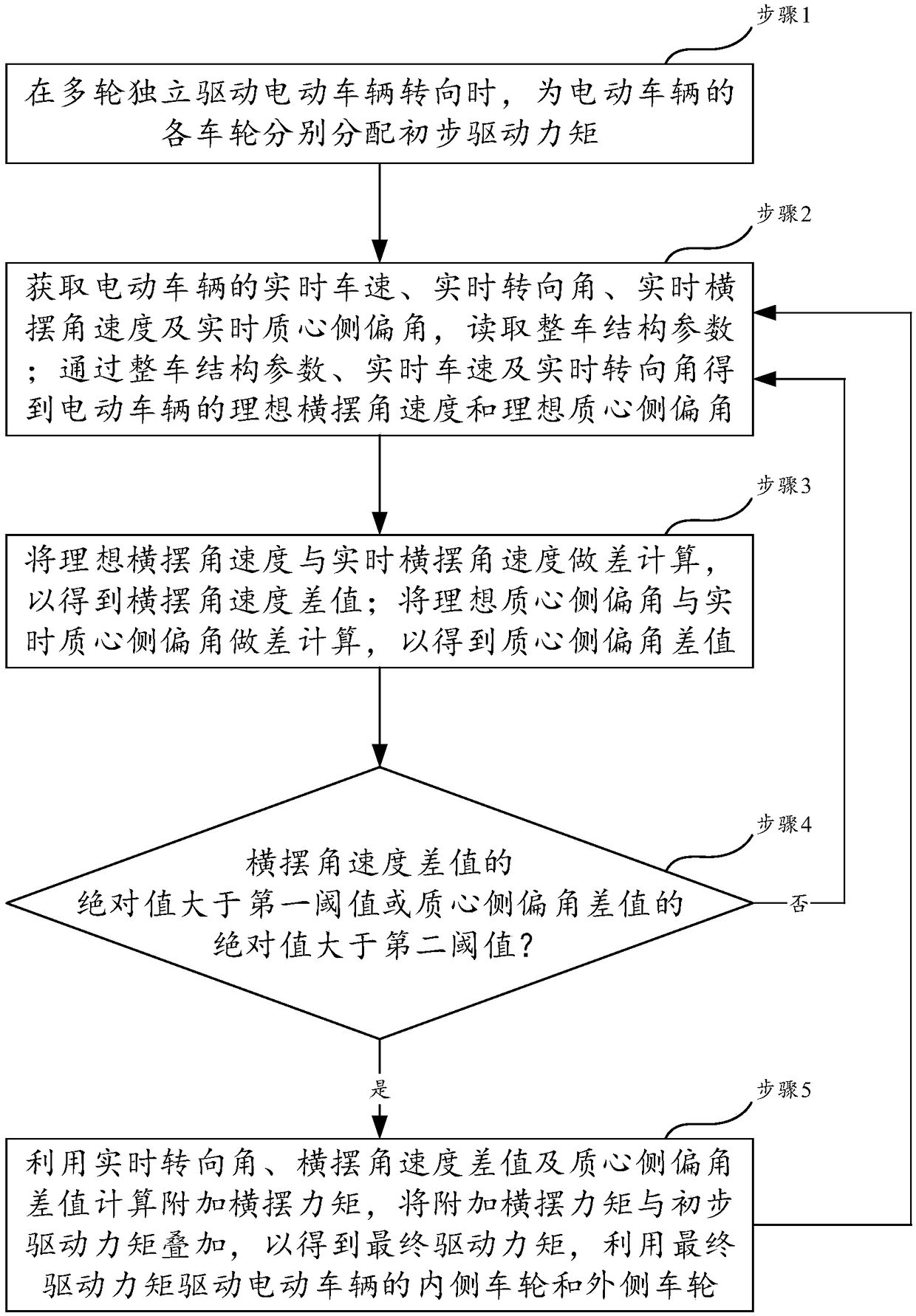
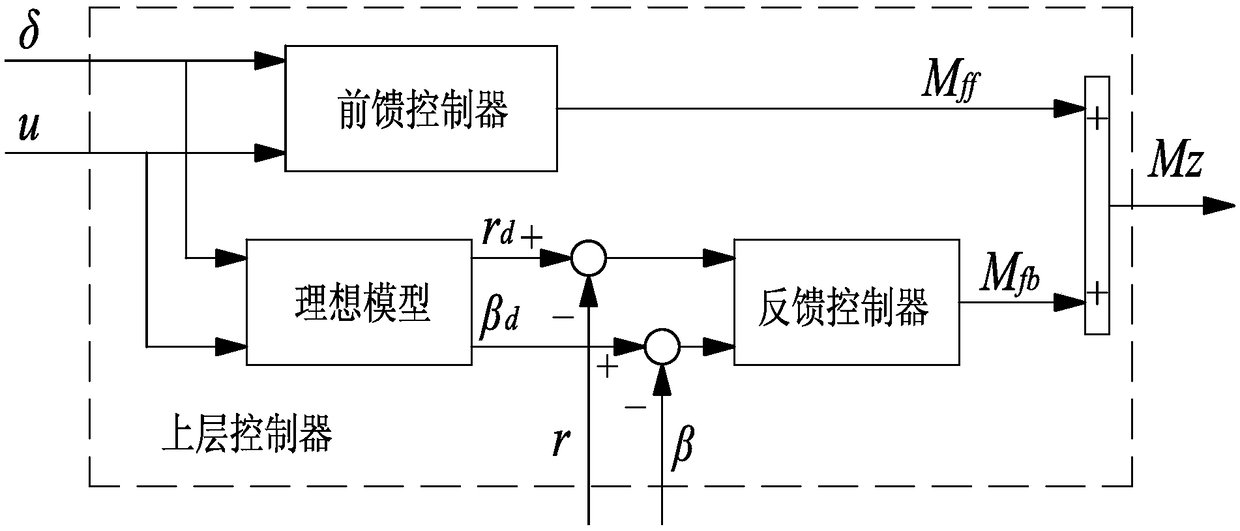
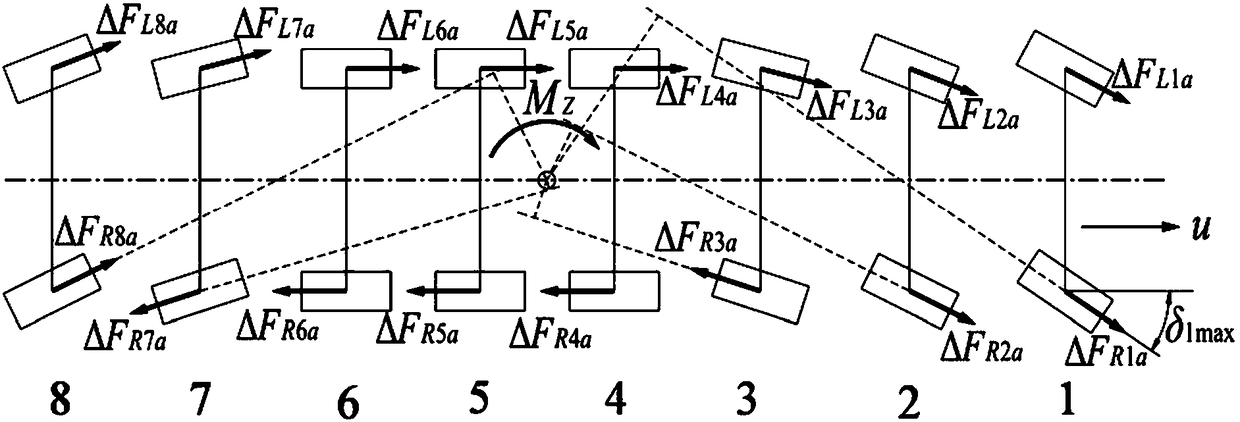
[0030] The method for controlling the yaw stability of the multi-wheel independently driven electric vehicle during steering according to the present invention will be explained and described in detail below in conjunction with the accompanying drawings.
[0031] Such as Figures 1 to 3 As shown, this embodiment specifically discloses a method for controlling the yaw stability of a multi-wheel independently driven electric vehicle when steering. The ideal steering parameters (yaw rate and side slip angle of the center of mass) are compared with the actual values at this time. If the difference is too large, it means that the vehicle is prone to yaw instability. At this time, calculate the yaw moment value that needs to be compensated, and then use In order to rationally distribute the compensation yaw moment to the driving torque (or "torque") of the inner and outer wheels to drive the electric vehicle to stabilize the steering and make the wheels work in an ideal state; spe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More