

Bridge crane support vector machine modeling method for protruding ring crossing operation rna-ga
An RNA-GA, support vector machine technology, applied in the direction of walking bridge cranes, cranes, geometric CAD, etc., can solve the problems of low precision and complex modeling methods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
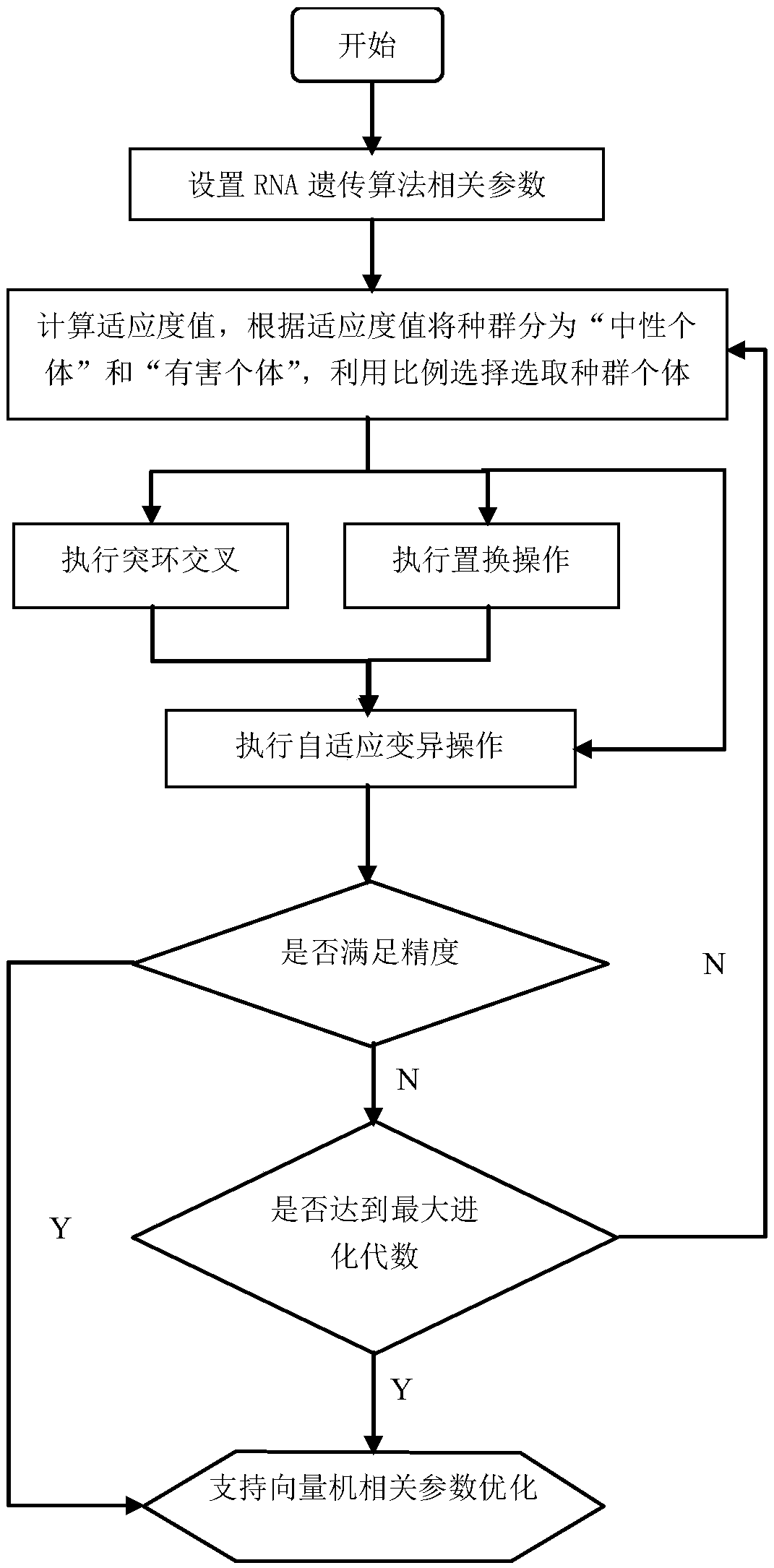
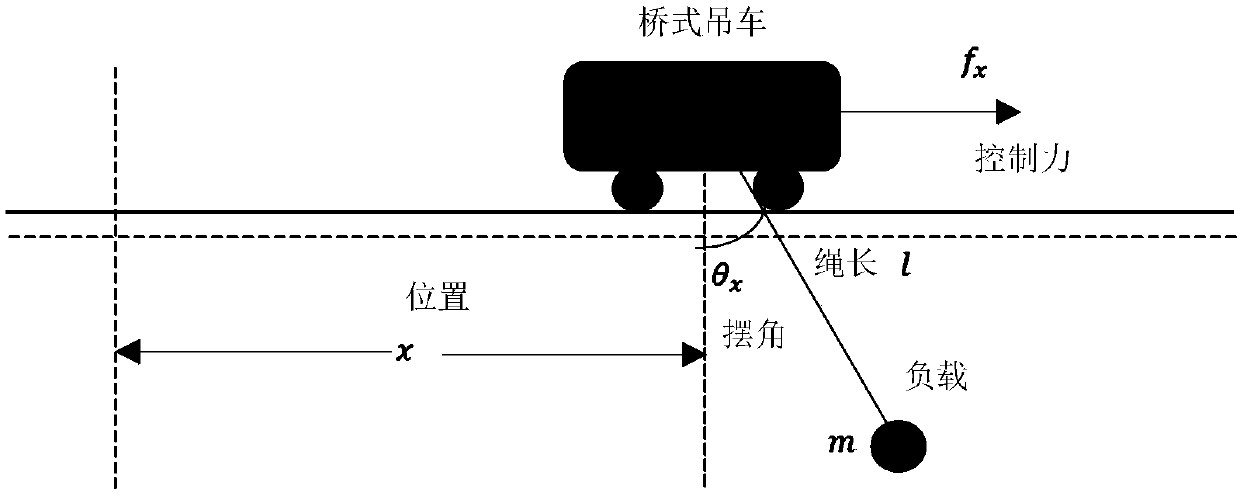
[0092] In this embodiment, the platform can be simplified as a two-dimensional overhead crane system, see figure 1 Crane system model diagram, the steps of the RNA-GA bridge crane genetic algorithm for the protruding ring cross operation are as follows:
[0093] Step 1: Obtain the horizontal direction control input f of the two-dimensional bridge crane system through the platform x , the position x in the horizontal direction and the swing angle θ x Output sampled data. The parameters of the bridge crane are set as trolley mass M=24.6kg, load mass m=5.4kg, rope length fixed l=0.7m, gravitational acceleration g=9.8m / s 2 . In the process of collecting experimental data, the open-loop state was kept, and the sampling period was 1 ms. A total of 5 sets of data were collected, each with 11,000 data, and 1,100 data were randomly selected from each of the 5 sets of data, of which 550 experimental data were used as training samples, and the rest are testing samples.
[0094] Step...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More