

A Realization Method of Humanoid Robot Adaptive Walking Framework Based on CPG Model
A technology of a humanoid robot and its implementation method, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of insufficient stability and adaptability, and achieve the effect of improving adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The embodiments of the present invention will be further described below with reference to the accompanying drawings.
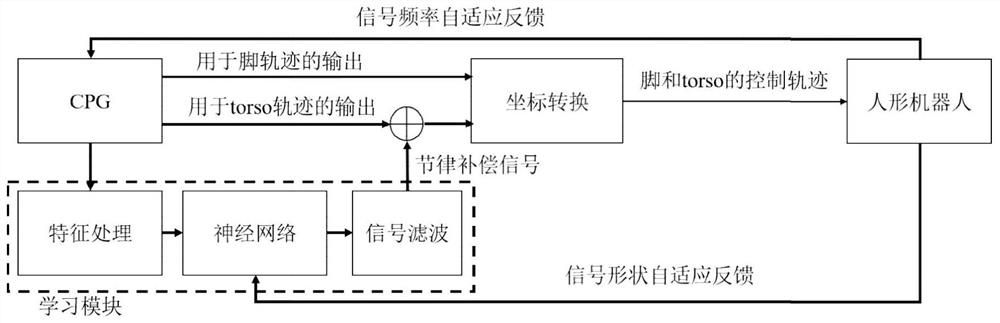
[0046] The present invention proposes a method for realizing an adaptive walking frame of a humanoid robot based on a CPG model. The whole frame diagram is attached figure 1 shown, including the following steps:
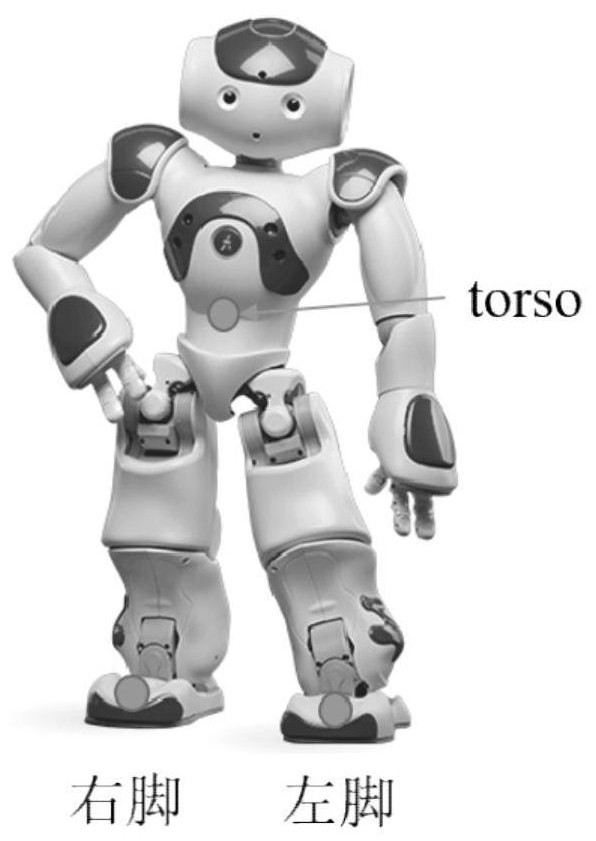
[0047] Step 1: Flat ground is the easiest environment for humanoid robots to walk, so a relatively simple CPG network can be designed to achieve flat ground walking, which provides a basis for the subsequent realization of more complex adaptive walking. The rhythm signal output by CPG is converted and used as the torso trajectory of the humanoid robot end effector foot and torso, so the constructed CPG network can use fewer neurons. Humanoid robot end effector foot and torso as attached figure 2 shown. In this step, the CPG contains only two neurons. The mathematical expression for each neuron is:
[0048]
[0049]
[0050] y i =...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More