Tower crane anti-swing operation control method
A tower crane, operation control technology, applied in the direction of transportation and packaging, load hanging components, etc., can solve the problems of increasing equipment cost, increasing the complexity of the control system, and the control amount cannot directly control the swing of the load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
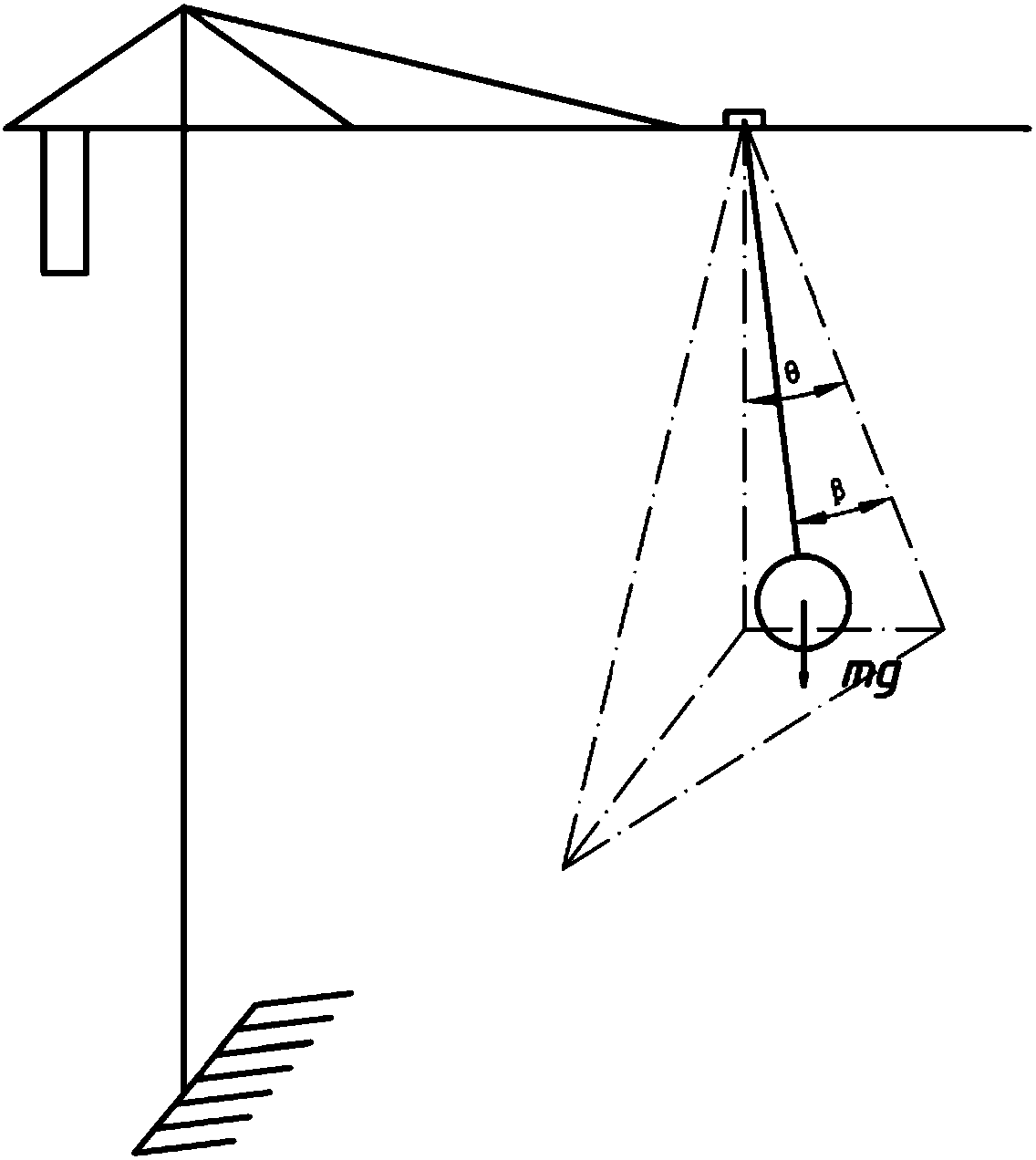
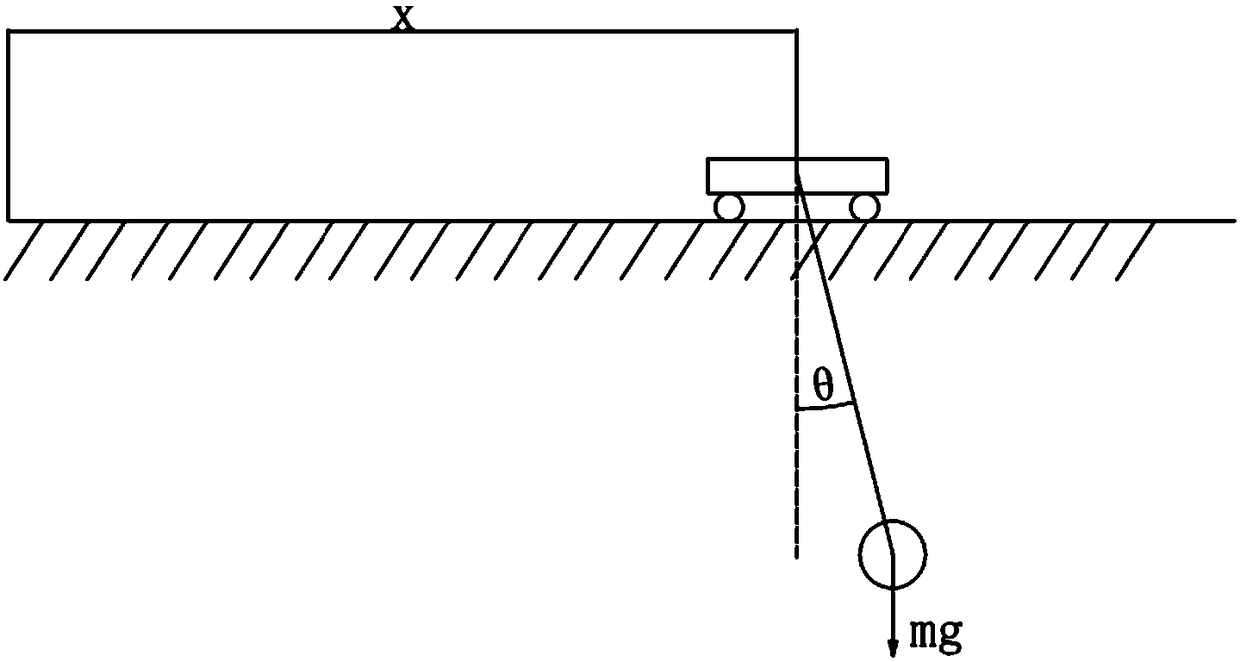
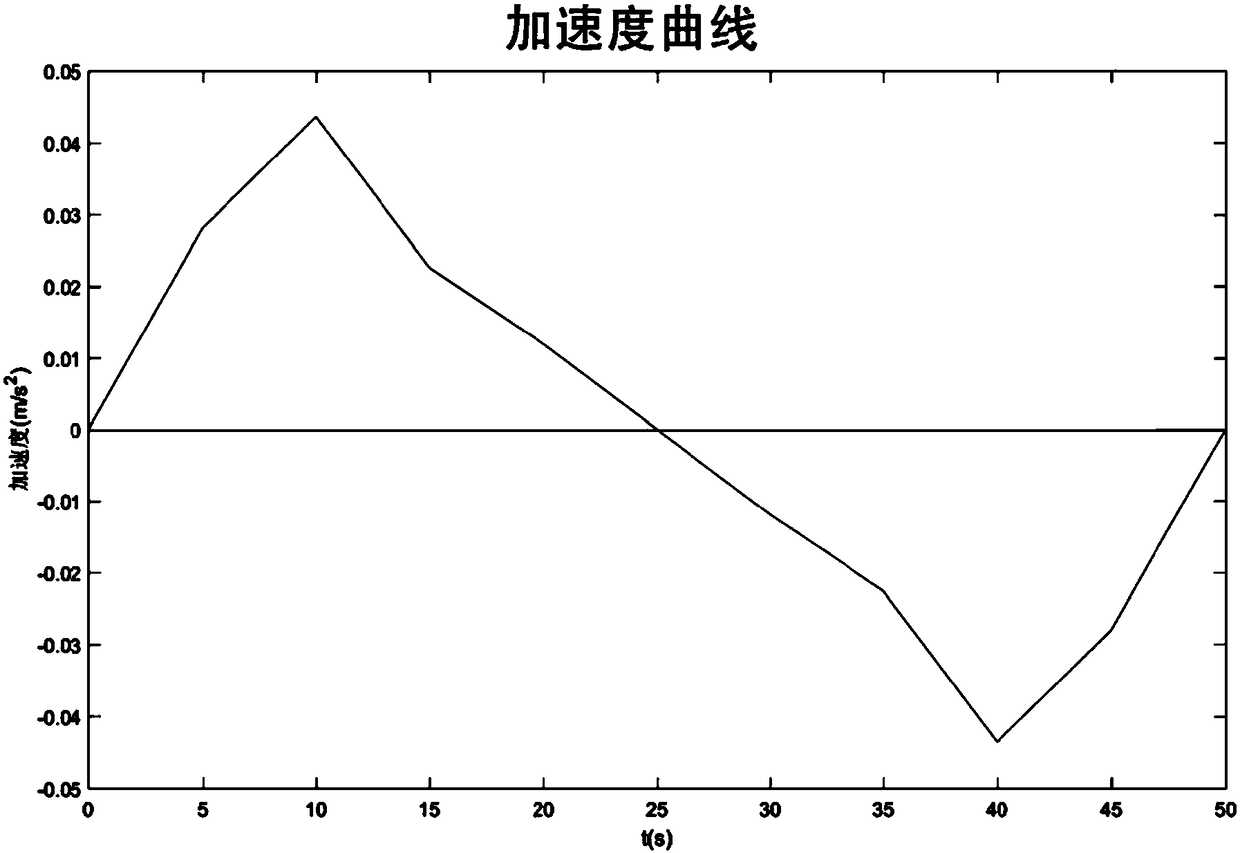
[0056] The present invention provides a tower crane anti-sway planning method, comprising: obtaining the operation parameters of the tower crane, planning the operation control curve of the tower crane according to the operation parameters; using the acceleration curve obtained by planning as the crane operation input to control the luffing mechanism / Acceleration / angular acceleration of the slewing mechanism. The present invention and the provided anti-sway planning method for tower cranes will be described in detail below.
[0057] During the process of transporting the load, the tower crane plans an acceleration curve with anti-sway function according to the input operating parameters, and operates according to the planned acceleration curve, and there is no residual swing after the luffing mechanism reaches the end point.
[0058] Step 1, input of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More