

Rescue robot with excellent vibration reduction
A rescue robot, good technology, applied in the field of rescue robots, can solve problems such as easy bumps, poor shock absorption effect of rescue robots, etc., and achieve the effects of adjustable chassis, compact structure, and stable transmission
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
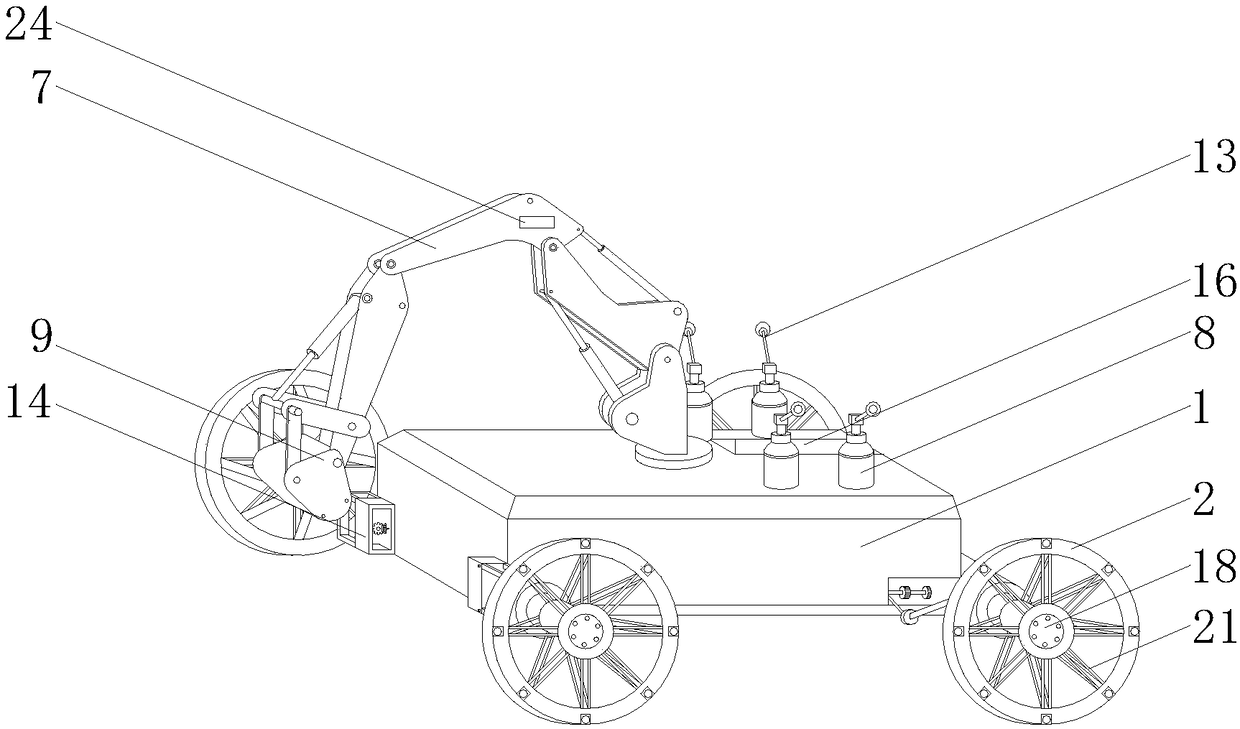
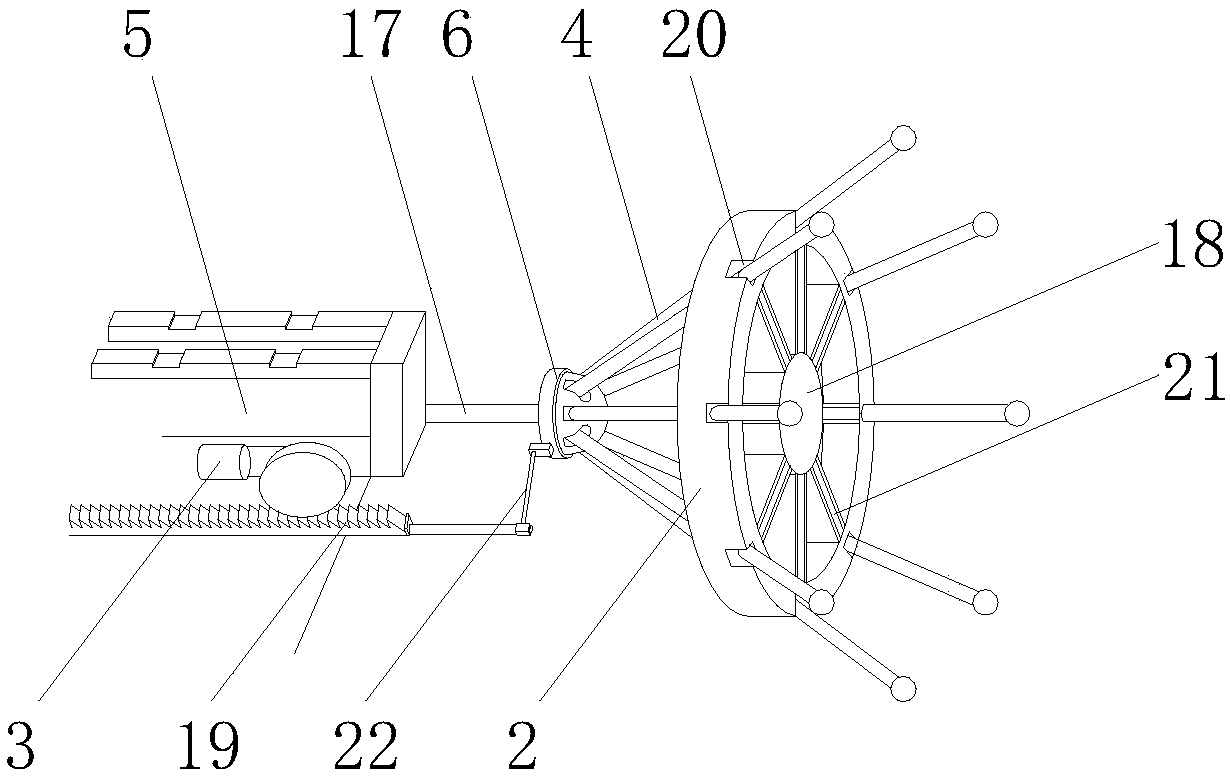
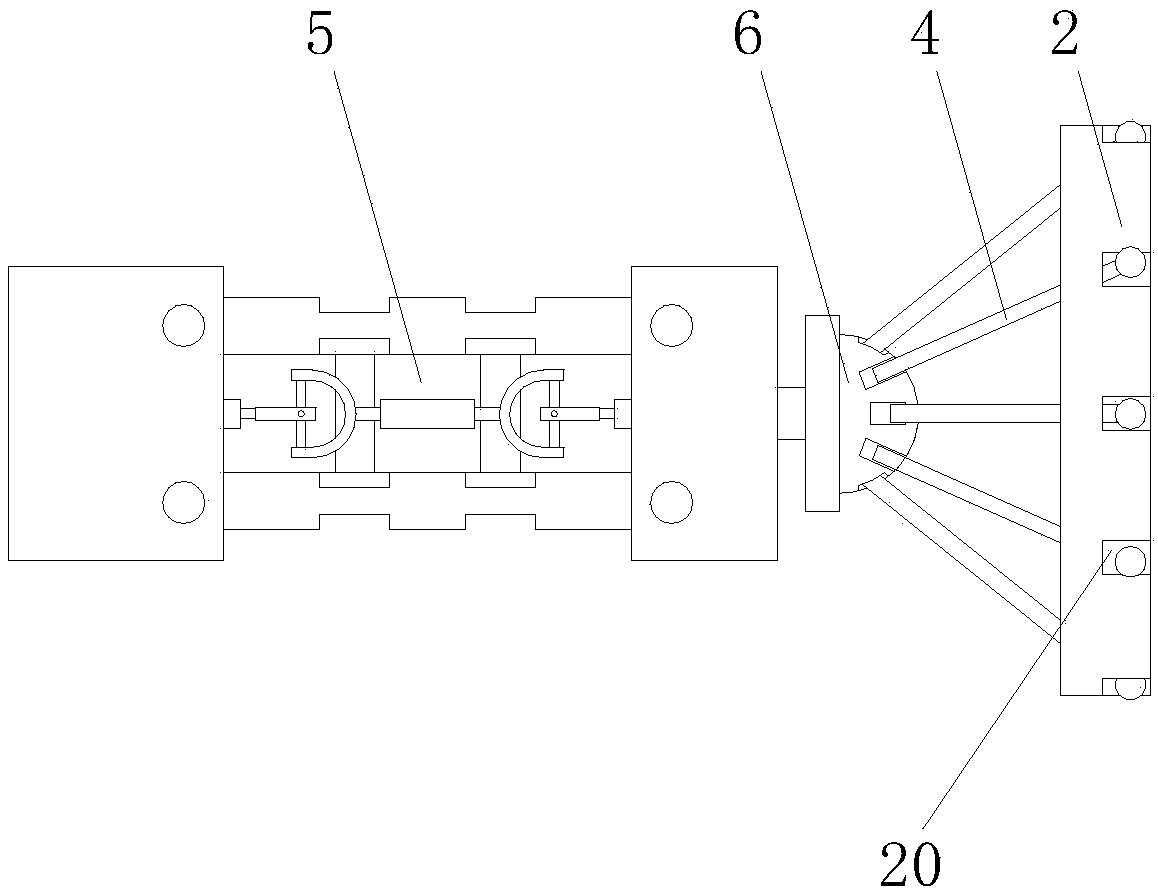
[0031] Embodiment 1, a rescue robot with good shock absorption, including a chassis 1 and wheels 2, the chassis 1 is provided with a controller 15 inside, and a number of wheels 2 are evenly and symmetrically distributed on both sides of the chassis 1. 2 is provided with a hub 18 and spokes 21, the hub 18 is connected with the wheel 2 through the spokes 21, the inner side of the hub 18 is provided with a transmission shaft 17, the transmission shaft 17 is provided with a worm gear connector 6, the worm gear The worm connector 6 is provided with a number of connecting grooves 27 that are evenly and symmetrically distributed in the center. The connecting grooves 27 are movably connected to one side of the telescopic rod 4 through the connecting rod 26. 4. A matching communication cavity 20, the other side of the telescopic rod 4 passes through the communication cavity 20, and the inner side of the spoke 21 is provided with a fixed groove 25 matching the telescopic rod 4 and the w...
Embodiment 2
[0032] Embodiment 2, a rescue robot with good shock absorption, including a chassis 1 and wheels 2, the chassis 1 is provided with a controller 15 inside, and a number of wheels 2 are evenly and symmetrically distributed on both sides of the chassis 1. 2 is provided with a hub 18 and spokes 21, the hub 18 is connected with the wheel 2 through the spokes 21, the inner side of the hub 18 is provided with a transmission shaft 17, the transmission shaft 17 is provided with a worm gear connector 6, the worm gear The worm connector 6 is provided with a number of connecting grooves 27 that are evenly and symmetrically distributed in the center. The connecting grooves 27 are movably connected to one side of the telescopic rod 4 through the connecting rod 26. 4. A matching communication cavity 20, the other side of the telescopic rod 4 passes through the communication cavity 20, and the inner side of the spoke 21 is provided with a fixed groove 25 matching the telescopic rod 4 and the w...
Embodiment 3
[0033]Embodiment 3, a rescue robot with good shock absorption, including a chassis 1 and wheels 2, the chassis 1 is provided with a controller 15 inside, and a number of wheels 2 are evenly and symmetrically distributed on both sides of the chassis 1. 2 is provided with a hub 18 and spokes 21, the hub 18 is connected with the wheel 2 through the spokes 21, the inner side of the hub 18 is provided with a transmission shaft 17, the transmission shaft 17 is provided with a worm gear connector 6, the worm gear The worm connector 6 is provided with a number of connecting grooves 27 that are evenly and symmetrically distributed in the center. The connecting grooves 27 are movably connected to one side of the telescopic rod 4 through the connecting rod 26. 4. A matching communication cavity 20, the other side of the telescopic rod 4 passes through the communication cavity 20, and the inner side of the spoke 21 is provided with a fixed groove 25 matching the telescopic rod 4 and the wo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More