

Multi-degree-of-freedom modular inspection robot
An inspection robot and modular technology, applied in the electric power field, can solve the problems of poor operation stability, inconvenient disassembly and maintenance, and unreliable positioning accuracy of the inspection robot, so as to achieve easy installation and maintenance, compact internal components, and ensure synchronization. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
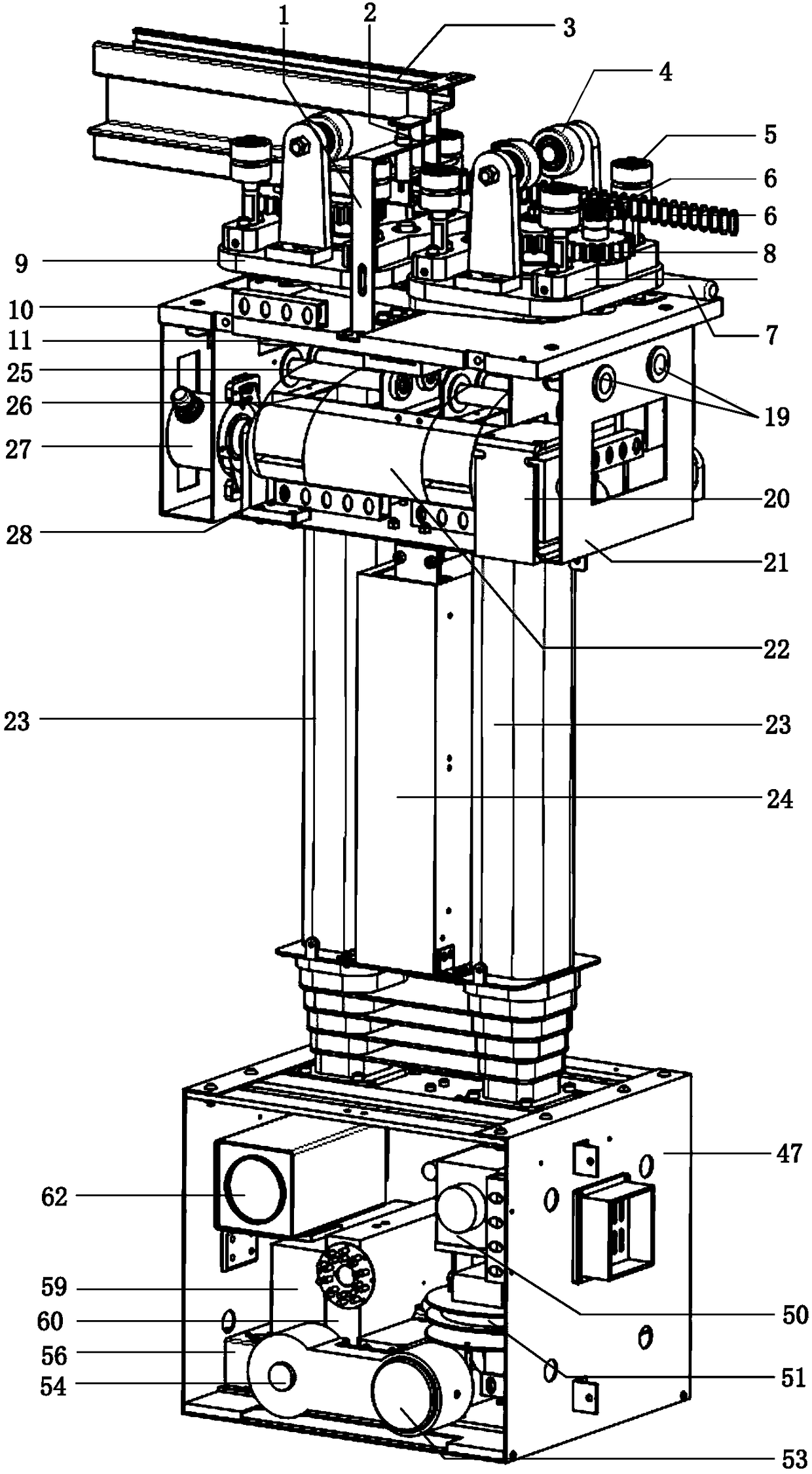
[0043] As an embodiment, the driving device includes a DC motor 33, a speed reducer 20, and a power supply 32 for supplying power to the DC motor; the DC motor 33 is connected to the speed reducer 20 through a flexible coupling; the speed reducer 20 The output shaft is coaxially connected with one end of the drum 22;
[0044] Further, the accelerator 20 adopts a worm gear reducer, and the worm gear reducer has a self-locking function, which can ensure that when the inspection robot system suddenly loses power and the DC motor of the telescopic rod cannot provide power, the telescopic rod will not stop. Slide down under its own gravity.
[0045] Further, the power supply 32 is a lithium battery, and the mounting frame 21 is provided with a charging terminal seat connected to the lithium battery to charge the lithium battery.
[0046] Further, the other end of the drum 22 is also provided with a second encoder 27, the second encoder 27 is coaxially connected with the drum 22, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More