

Vehicle integrated positioning method for advanced automatic driving V2X and laser point cloud registration
An autonomous driving, laser point cloud technology, applied in advanced technology, vehicle components, vehicle wireless communication services, etc., can solve problems such as poor GNSS signal, the impact of vehicle positioning in the road network, and reduce vehicle and pedestrian safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0076] The present invention will be further described below in conjunction with the accompanying drawings.
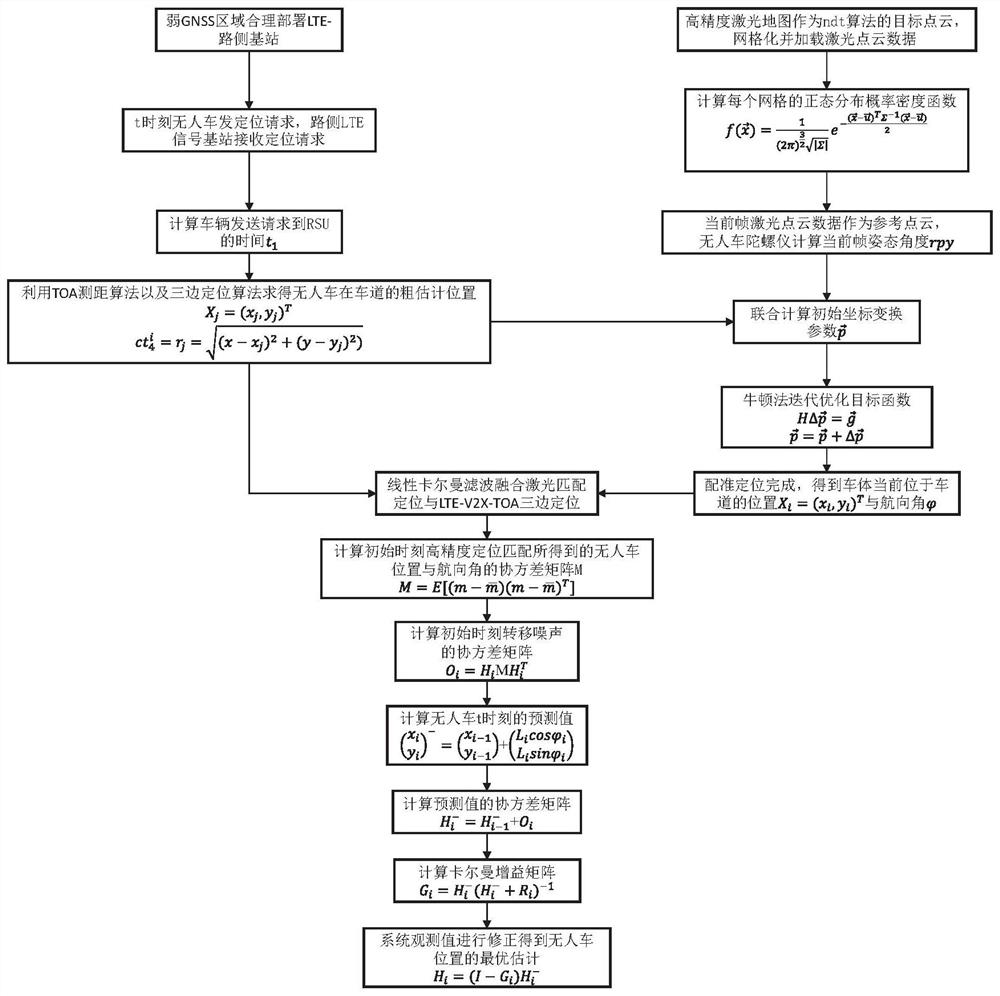
[0077] Step 1. Use the vehicle-road coordination LTE-V2X positioning technology to realize the preliminary positioning of the unmanned vehicle;
[0078] E. First, reasonably deploy the number and location of roadside LTE signal base stations in weak GNSS signal areas, so that the vehicle is always within the good communication range of at least three roadside LTE signal base stations during operation. The unmanned vehicle drives on the road as a mobile node, and the roadside LTE signal base station serves as a fixed positioning base station.
[0079] F. The unmanned vehicle sends a positioning request request and marks the sending time. Then, after receiving the positioning request from the unmanned vehicle, the roadside LTE signal base station marks the arrival time of the request. Then calculate the time difference t between sending and arriving 1 , and the reques...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More