

Metamorphic mechanism for realizing switching of flapping-wing robot between flying action and running action
A metamorphic mechanism and robot technology, applied in the field of metamorphic mechanisms, to achieve obvious bionic effects, enhance artificial intelligence, and reduce energy loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
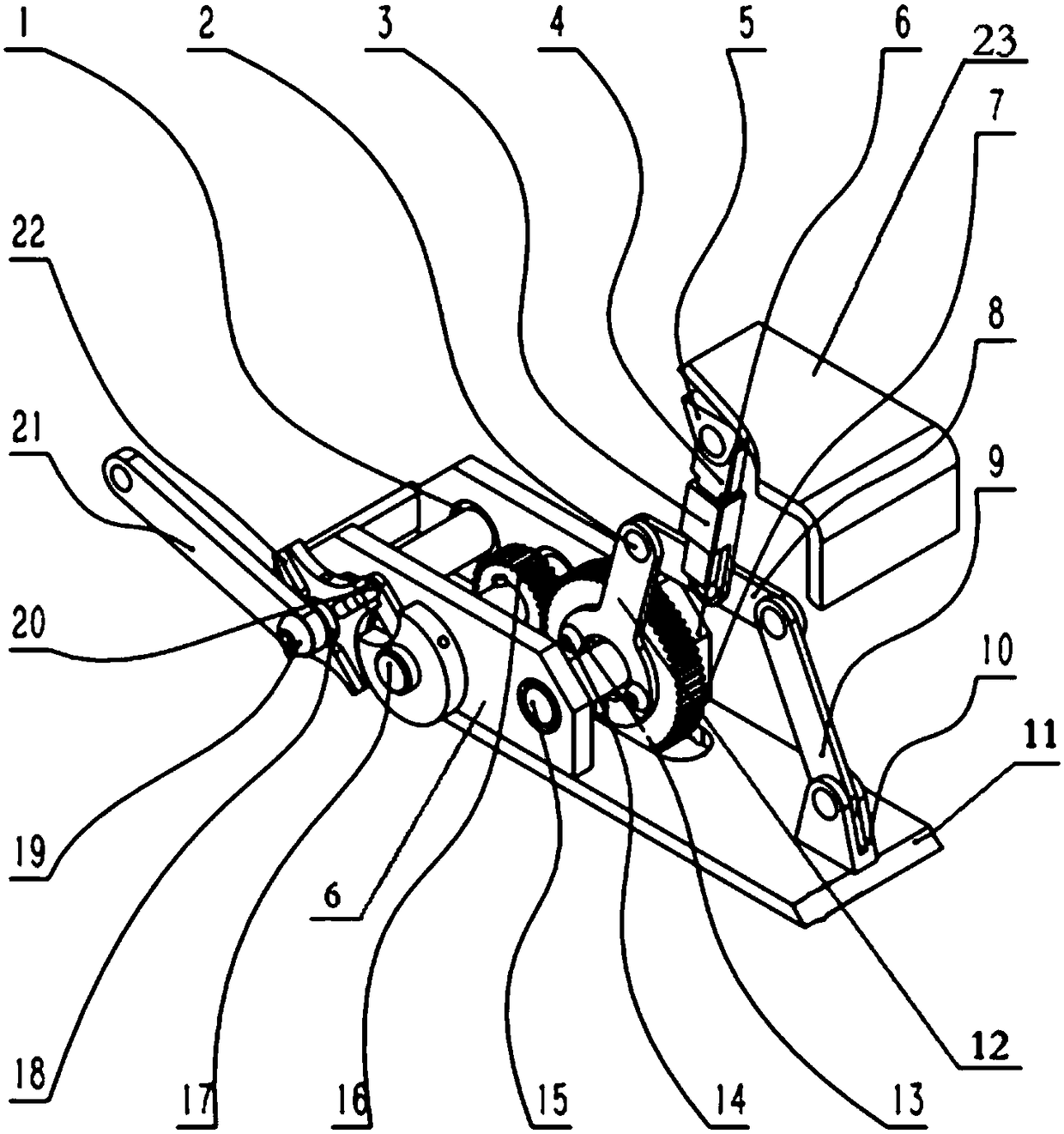
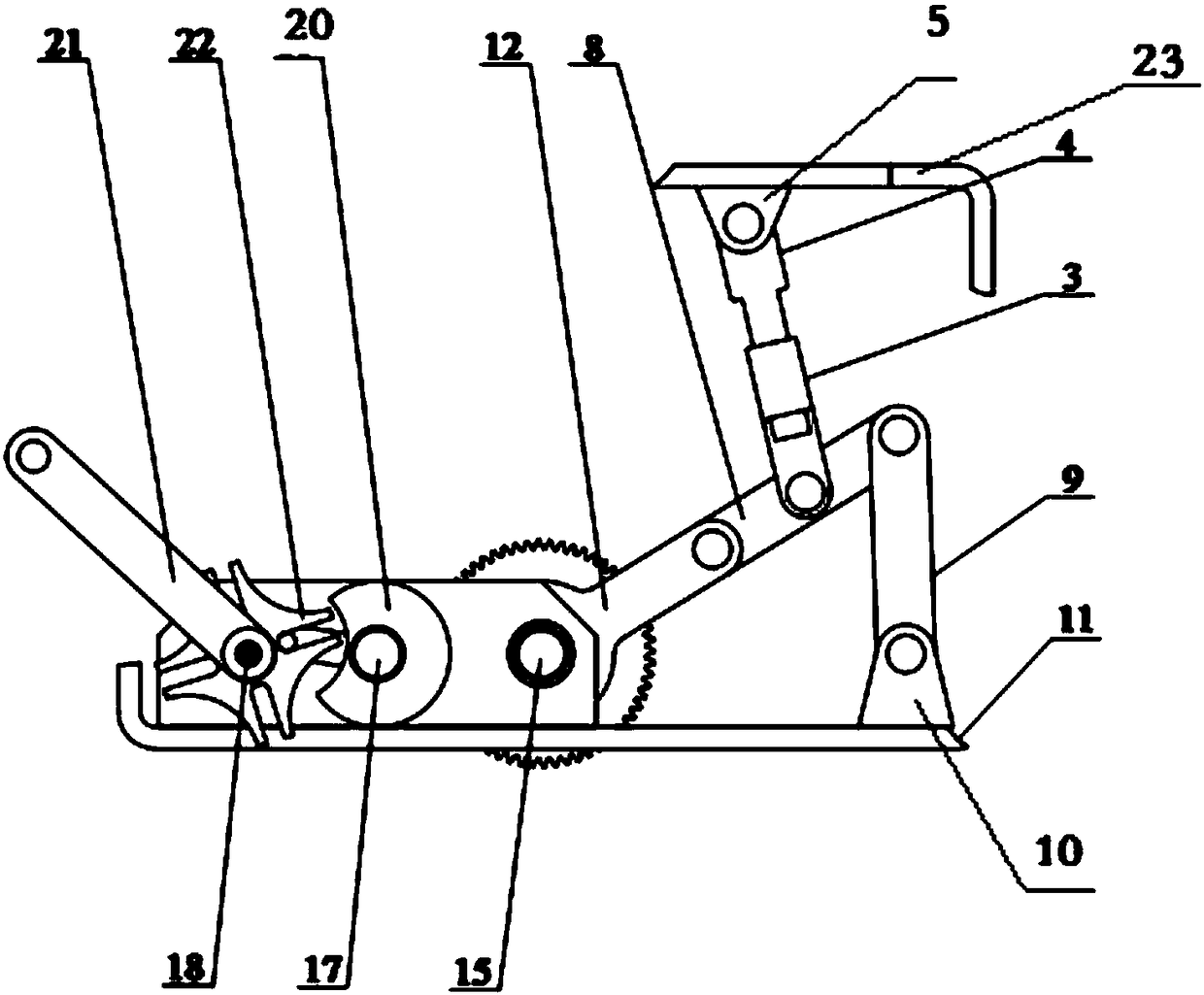
[0032] Such as figure 1 As shown, this embodiment provides a metamorphic mechanism for a flapping wing robot to switch between flying and running actions, including a bracket 11 and a mode switching module, a delay module, a connecting module, and an external leg link arranged on the bracket 11 21 and the fuselage 23 of the flapping wing robot, the lower end of the external leg connecting rod 21 is connected with the leg mechanism of the flapping wing robot; the whole metamorphic mechanism is located at the center of the abdomen of the bionic flapping wing robot;
[0033] The mode switching module comprises a five-bar linkage structure formed by connecting the first bar 12, the second bar 8, the third bar 9, the fourth bar 3, and the fifth bar 4, and a third shaft 15; wherein, the third shaft 15 is connected to the The output shaft of the flapping wing robot stepper motor is connected and matched with the connection module; one end of the first rod 12 is provided with a shaft ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More