

Carriage positioning method and positioning device
A positioning method and technology of positioning device, which are applied to measurement devices, optical devices, instruments, etc., can solve the problems of lack of waterproof measures for laser sensors, poor installation of sensors, interference of vehicles, etc., and achieve rapid positioning and measurement results. Accurate, cost-reduced results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
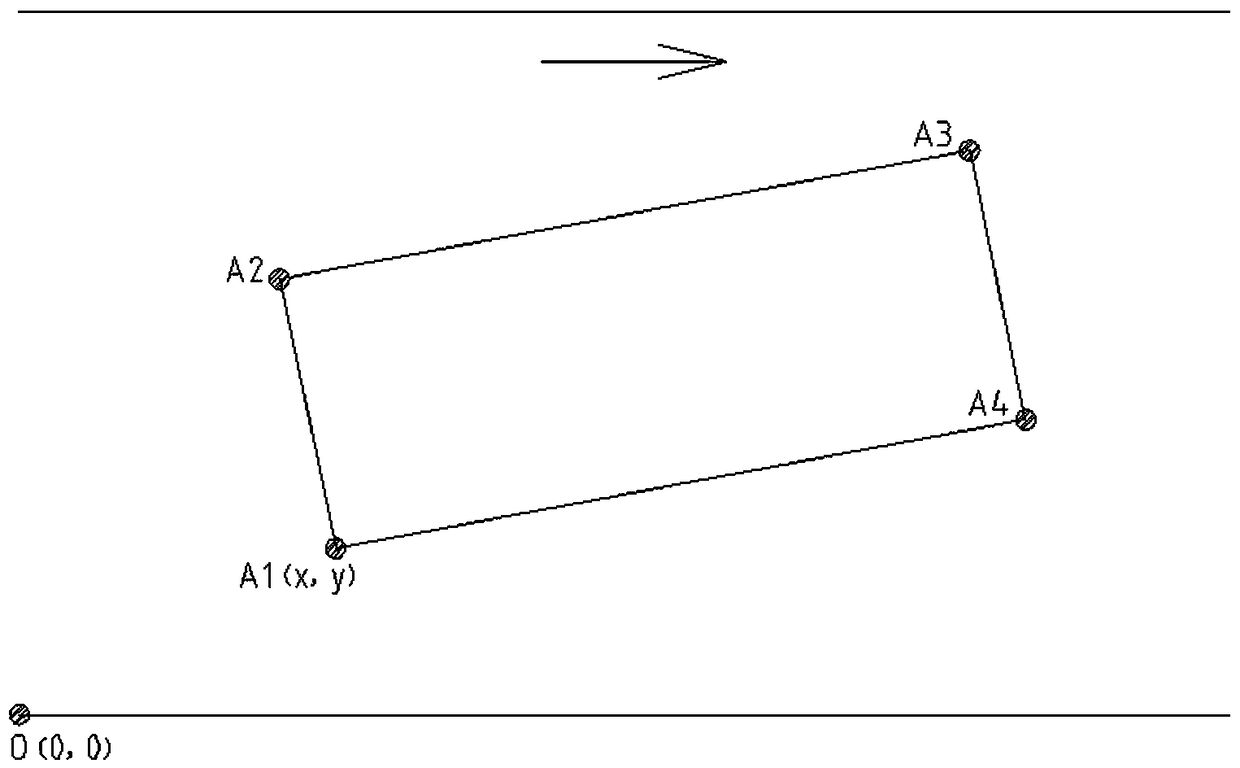
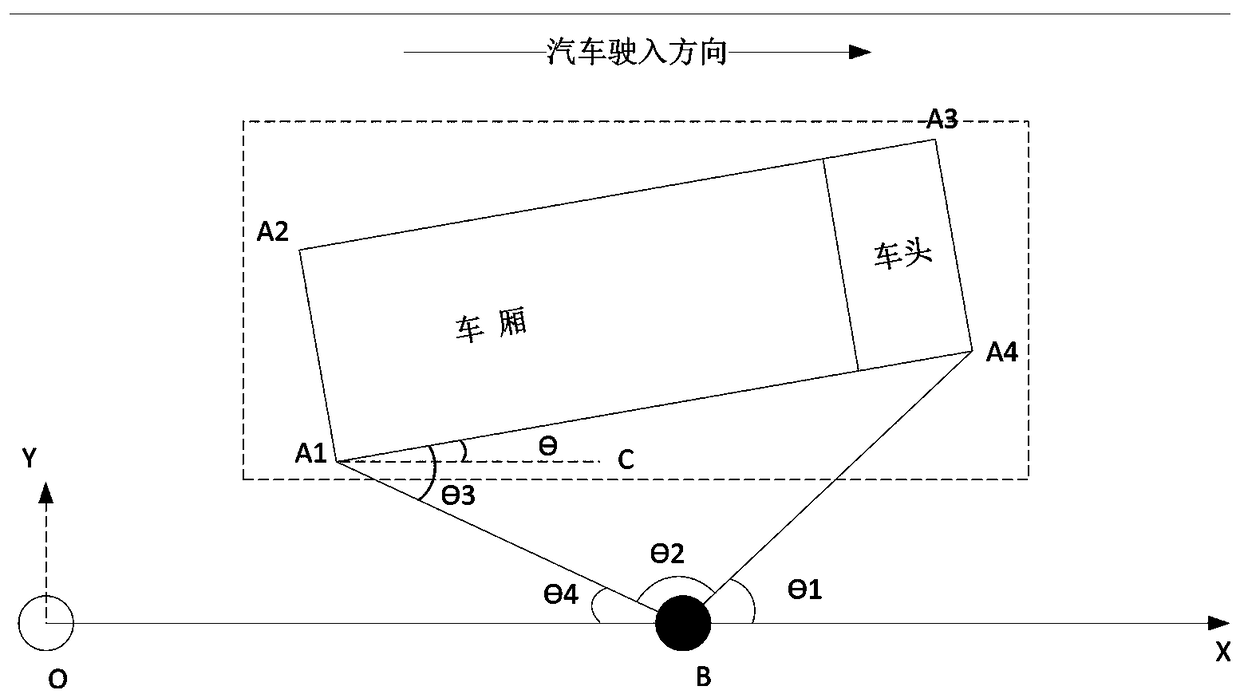
[0030] Embodiment one: if image 3 As shown, the compartment positioning method of the present embodiment includes the following steps: S1. At the scanning origin, a side of the compartment is scanned through the horizontal rotation of the sensor, and the distances between at least two scanning points on the side and the scanning origin are obtained respectively. And the corresponding scanning angle, at least one of the scanning points is an endpoint; S2. Calculate and determine the coordinates of the endpoint and the declination angle of the carriage according to the distance and angle; S3. Determine the carriage according to the preset vehicle model data, as well as the coordinates and declination of the endpoint s position. A complete scan is performed on the side, with two scan points, both of which are endpoints. The scanning origin is located in the middle of one side of the car's parking reference area. First construct the scanning coordinate system according to the s...
Embodiment 2
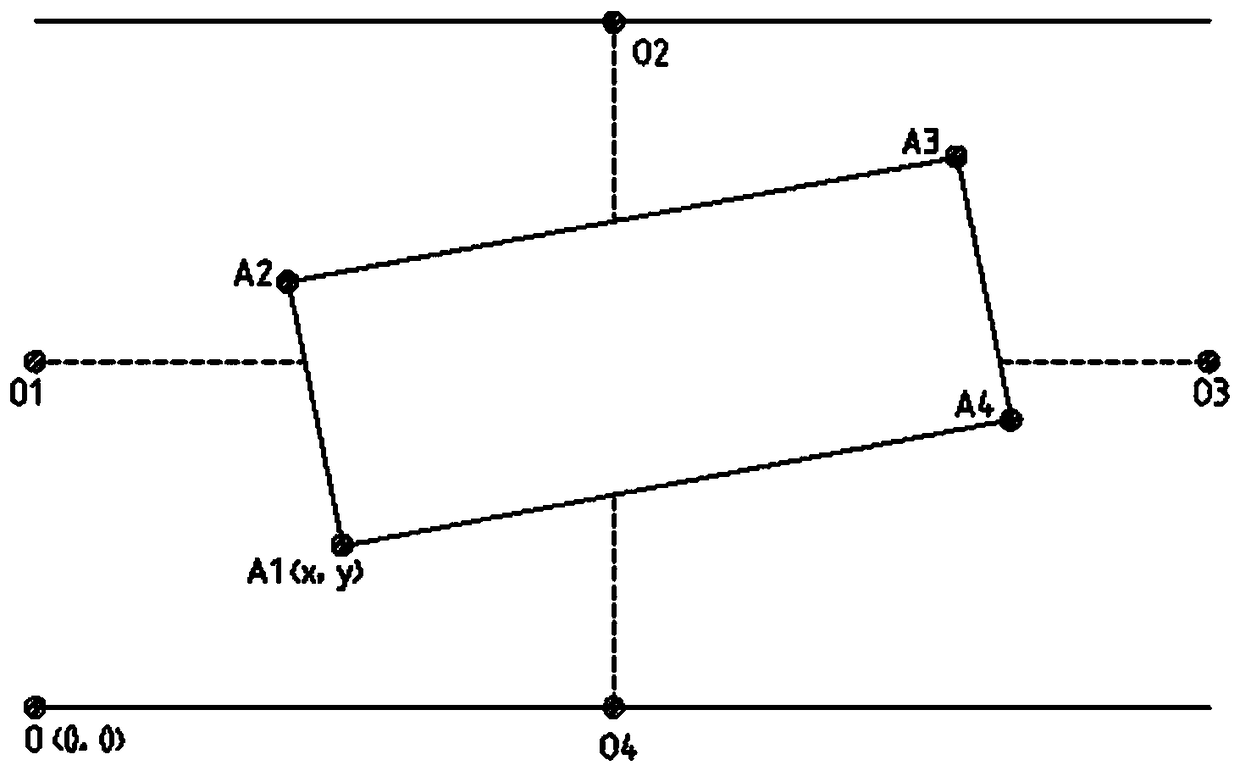
[0040] Embodiment 2: The positioning method of this embodiment is basically the same as that of Embodiment 1, the difference is that: the side is scanned incompletely, two scanning points are used, and one scanning point is an end point. Another scanning point is preferably a scanning point corresponding to the scanning start position.
[0041] Such as Figure 4 As shown, compared with Embodiment 1, the scanning initial position of the scanning sensor in this embodiment is not in the direction of the X-axis in the positioning coordinate system, but has a certain angle in the counterclockwise direction relative to the X-axis, such as Figure 4 As shown in , the initial position is the direction of the Y axis, that is, the angle is 90 degrees. Of course, it can also be less than 90 degrees. For example, the initial position is the position indicated by BD. The initial position is determined according to the actual situation, and the purpose is to further reduce the scanning ran...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More