Robot obstacle avoidance system and method based on obstacle motion state prediction
A motion state and mobile robot technology, applied in control/regulation systems, instruments, motor vehicles, etc., can solve problems such as time-consuming, inability to detect distance information, complexity, etc., achieve good versatility, realize autonomous obstacle avoidance, good stability effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
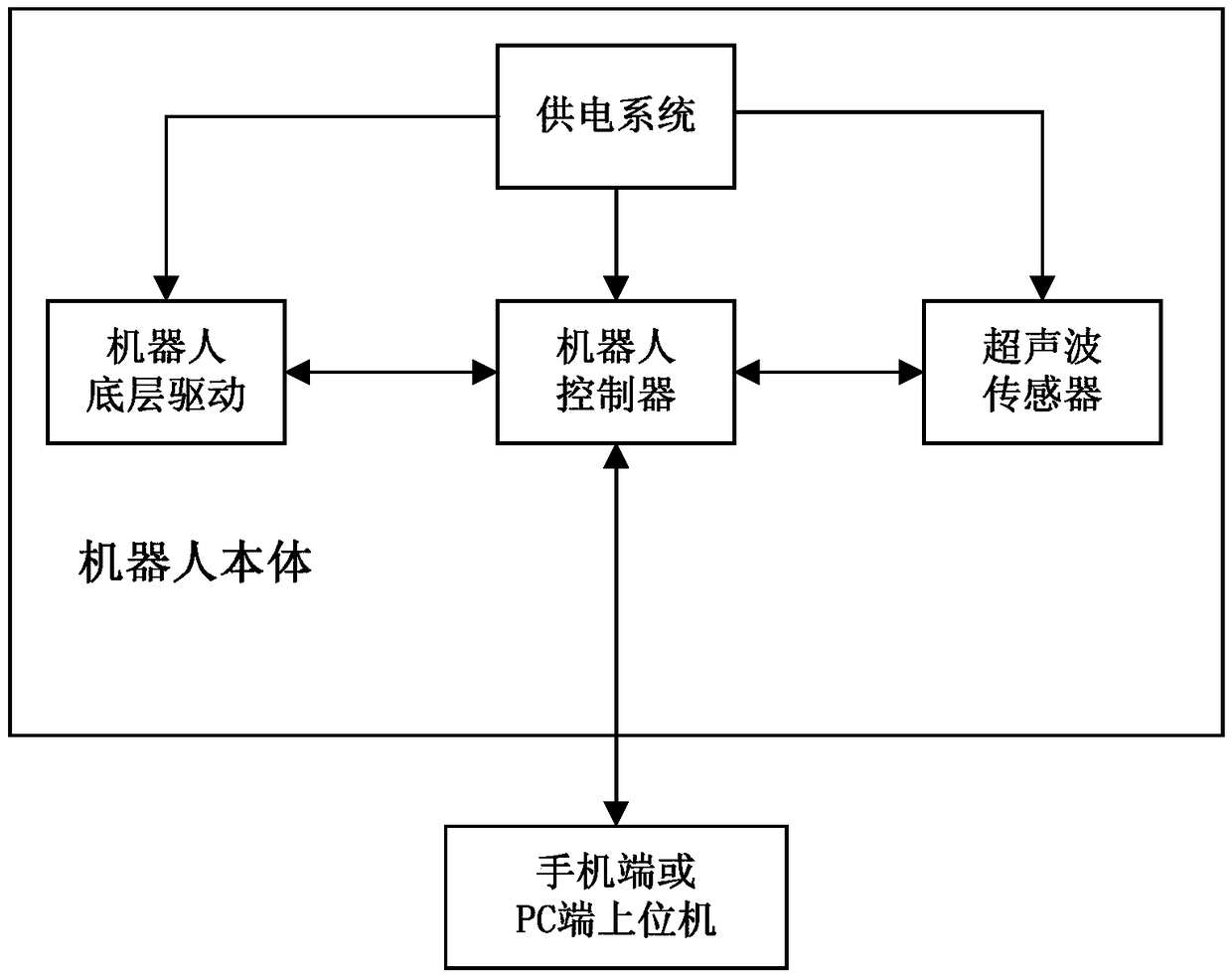
[0044] Such as figure 1 and figure 2 As shown, the robot obstacle avoidance system based on the obstacle motion state prediction includes:
[0045] A robot obstacle avoidance system based on obstacle motion state prediction, including:
[0046] Mobile robots with underlying drivers;
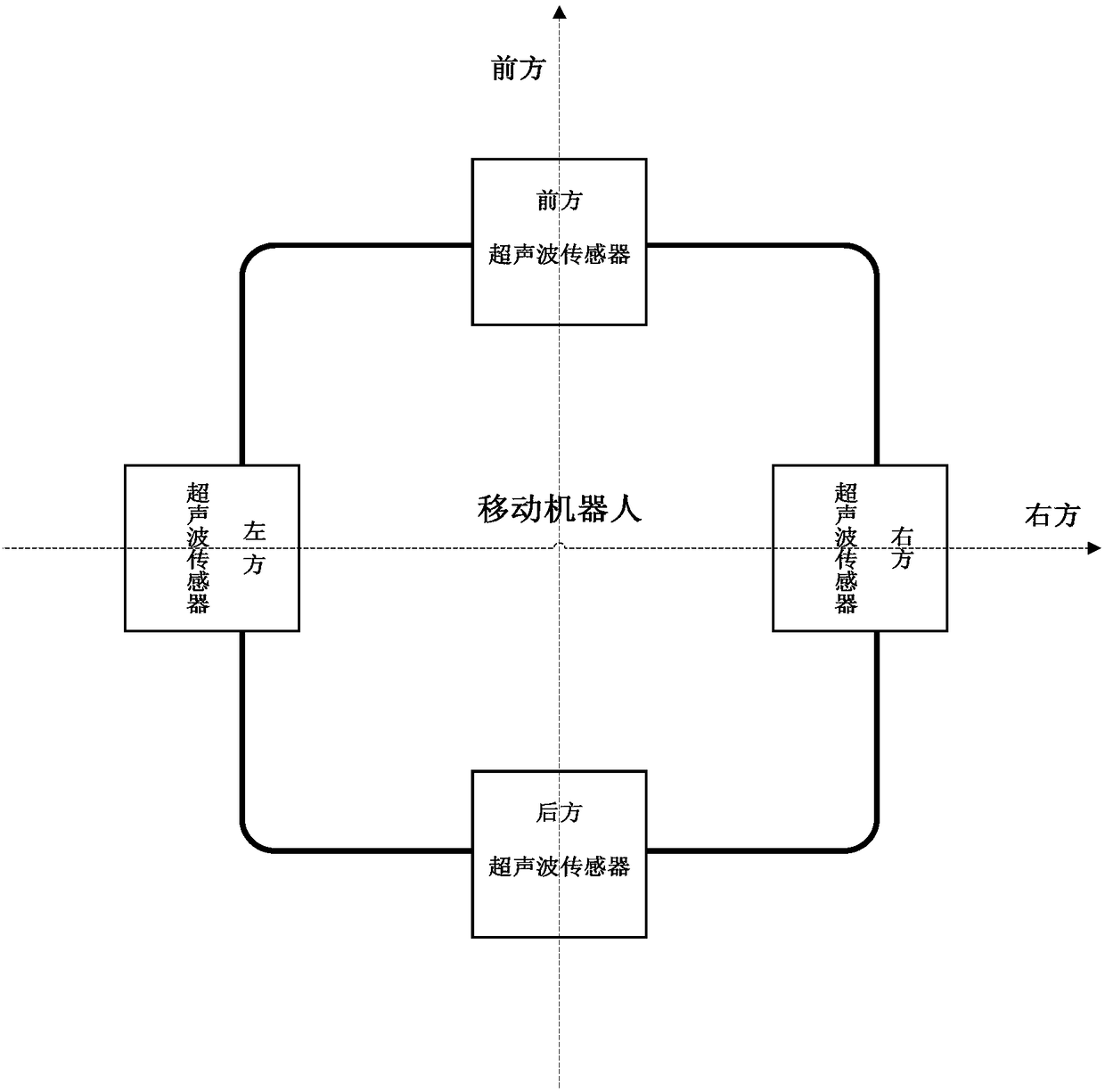
[0047] Four ultrasonic sensors are evenly distributed in the four directions of front, rear, left and right of the mobile robot, and are connected to the corresponding ports of the robot controller through ports. The emission directions of the four ultrasonic sensors are all outward, Used to obtain the distance information of obstacles (see figure 2 );
[0048] The robot controller is used to fuse, analyze and process the obstacle distance information acquired by the ultrasonic sensor, and then control the mobile robot to move and avoid obstacles;
[0049] a power supply system, used to supply power to the mobile robot and the robot controller;
[0050] Mobile phone terminal or PC termina...
Embodiment 2
[0053] A robot obstacle avoidance method based on obstacle motion state prediction, comprising steps:
[0054] S1. Initialize the four ultrasonic ranging modules;
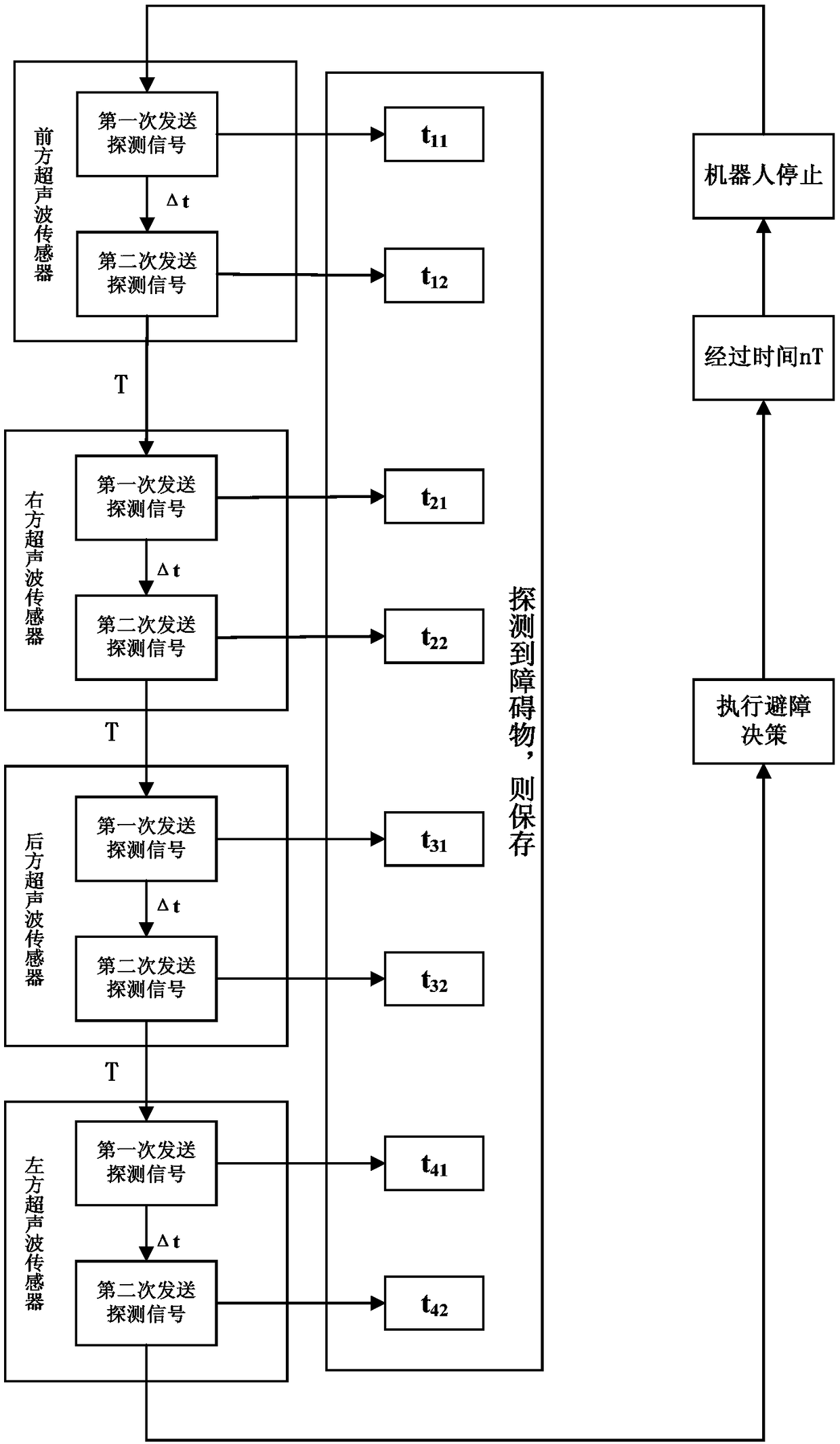
[0055] S2. The four ultrasonic sensors adopt a time-sharing mechanism. When the speed of the robot is zero, the front, right, rear, and left ultrasonic sensors perform cyclic ranging according to a certain period and order. Each ultrasonic sensor Detect the information of obstacles in their respective directions, and the robot controller reads and saves the detection information;
[0056] S3. According to the ranging result of the ultrasonic sensor, predict the location of the obstacle, and estimate the movement state of the obstacle, including the magnitude and direction of the movement speed;
[0057] S4. Based on the motion state of the obstacle estimated in step S3, the robot executes a corresponding obstacle avoidance decision.
[0058] Specifically, as image 3 As shown, in the step S2, the four ultrasonic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More