

A Path Planning Method for 3D Point Cloud Surface Divided by Discontinuous Grid
A 3D point cloud and path planning technology, which is applied in manufacturing auxiliary devices, processing data acquisition/processing, additive processing, etc. Quantity, guaranteed accuracy, and strong applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment example
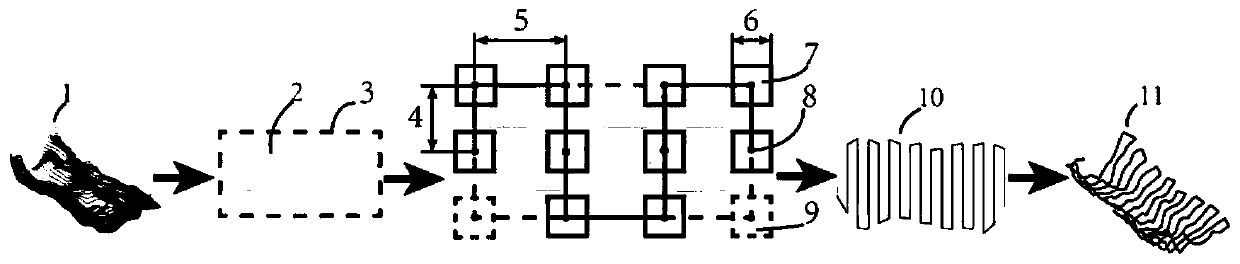
[0061] The skin defect model is a 20mm×15mm curved three-dimensional structure with a depth of 2mm. The in-situ printing process used is micro-extruded gelatin and sodium alginate, the line width of the extruded material is 1 mm, and the allowable error of the plane size boundary feature is 0.5 mm. The scanning equipment in the in situ printing system was used to obtain the three-dimensional point cloud surface of the two-layer skin defect with a depth of 1mm and 2mm, respectively, and the resolution of each layer of point cloud data was 0.2mm. Therefore, according to the method in the patent, the value range of the grid size parameter is 0.2-0.4mm, the value range of the grid spacing parameter is 0-0.4mm, the line spacing parameter is 1mm according to the material line width, and the boundary indentation parameter is 0.5mm, and other parameters can be taken as: grid center point thinning parameter is 2, multi-layer printing parameter is 2, nozzle lift parameter is 10mm. A be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More