

Double-robot-movement control method
A technology of robot motion and control method, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc. It can solve the problems of occupying control cabinet space, high control cost, and low flexibility, so as to reduce the probability of communication failure and improve space. Utilization rate and the effect of reducing the difficulty of teaching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, and the present invention will be further elaborated.
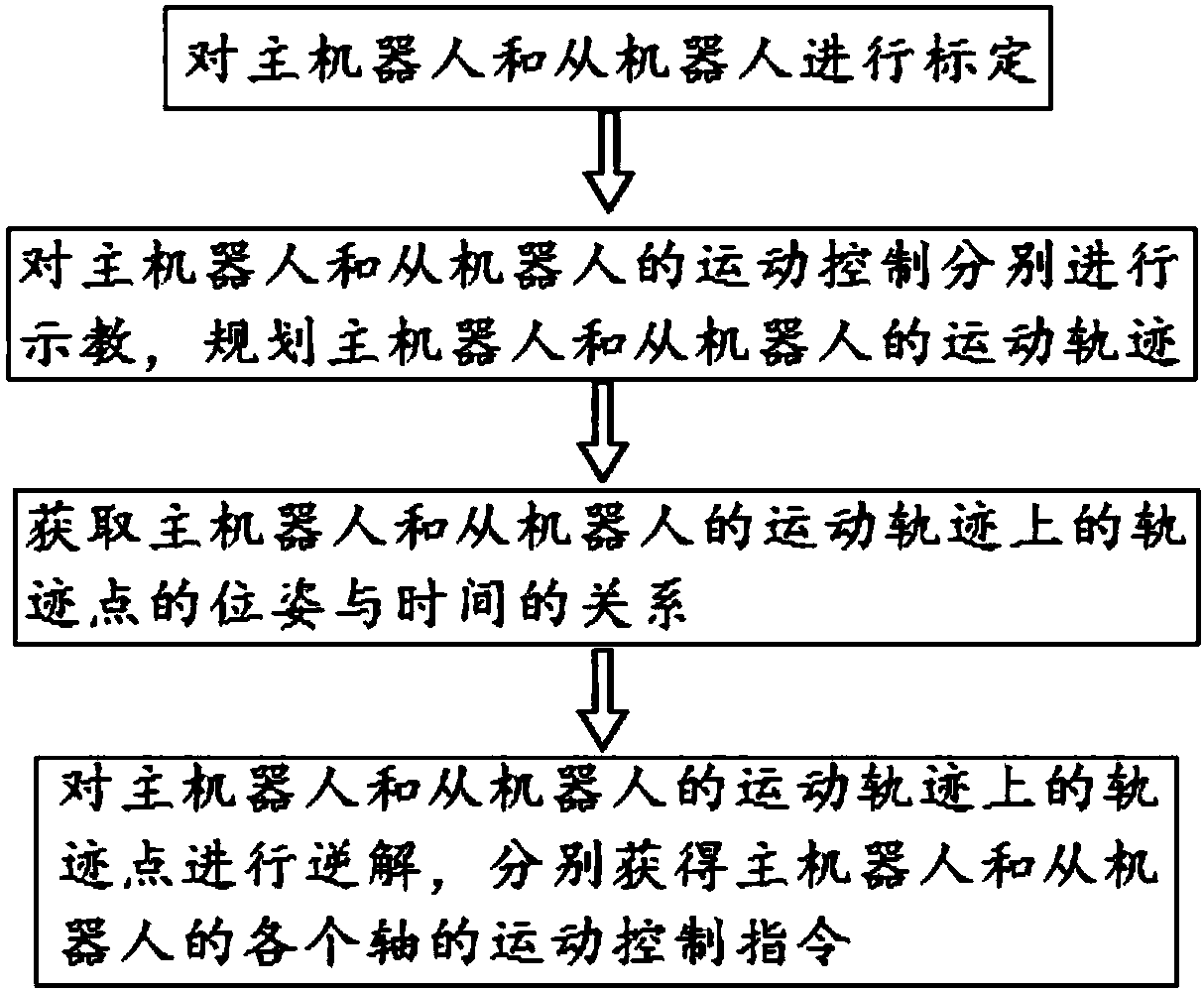
[0037] First, combine the Figure 1~3 Describe the dual-robot motion control method according to the embodiment of the present invention, which is used for the coordinated motion control of the master robot and the slave robot, such as figure 1 shown, including the following steps:
[0038] In step S1, the master robot and the slave robot are calibrated; the master robot and the slave robot are calibrated through the following sub-steps:
[0039] In step S1.1, a calibration tool is installed on the ends of the master robot and the slave robot respectively. In this embodiment, the calibration tool is a short rod with a pointed point, which can be regarded as a tool of the robot.
[0040] In step S1.2, respectively measure the position and attitude transformation of the tool of the mai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More