

Construction road pedestrian and vehicle collision avoidance early warning system based on vehicle-road collaboration and construction road pedestrian and vehicle collision avoidance early warning method based on vehicle-road collaboration
A vehicle-road coordination and vehicle collision avoidance technology, which is applied in the traffic control system, anti-collision system, traffic control system and other directions of road vehicles, can solve the problems of easily causing traffic accidents and blocking the driver's sight, so as to reduce collision accidents, The effect of improving traffic safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
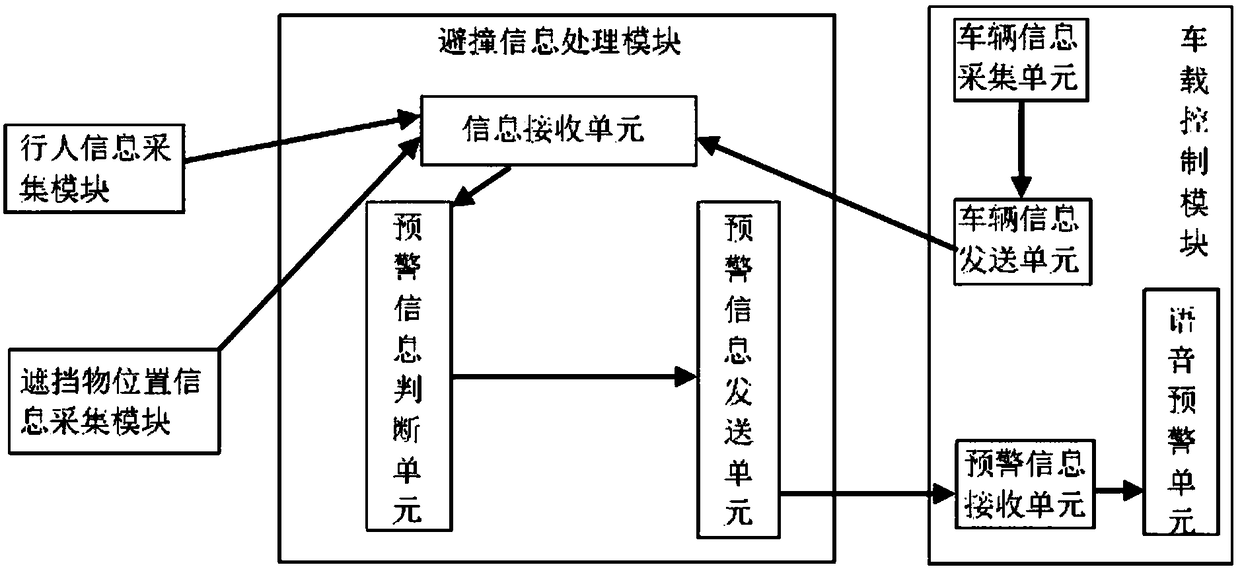
[0066] Such as figure 1 As shown, Embodiment 1 of the present invention provides a pedestrian-vehicle collision avoidance warning system based on vehicle-road coordination. The system includes a pedestrian information collection module, an obstruction position information collection module, a collision avoidance information processing module, and a vehicle control module;
[0067] The pedestrian information collection module is used to collect pedestrian position information and pedestrian speed information, and send the pedestrian position information and pedestrian speed information to the collision avoidance information processing module;
[0068] The block position information collection module is used to collect block position information, and send the block position information to the collision avoidance information processing module;
[0069] The collision avoidance information processing module is used to receive the pedestrian position information, pedestrian speed in...
Embodiment 2
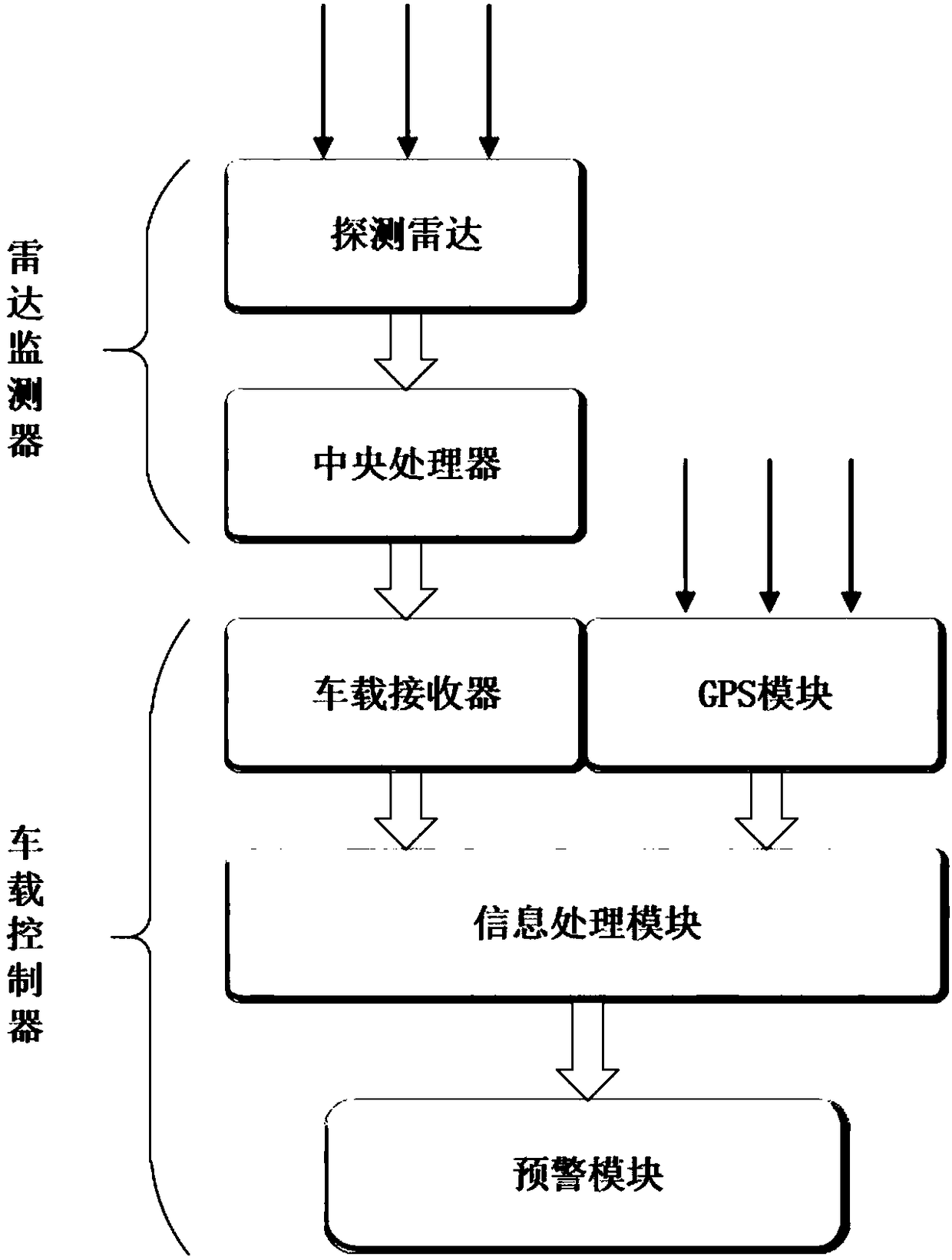
[0081] Such as figure 2 As shown, Embodiment 2 of the present invention provides another pedestrian-vehicle collision avoidance warning system for construction roads based on vehicle-road coordination.
[0082] In this embodiment, the radar monitor is used as a pedestrian information acquisition module and an obstruction position information acquisition module to monitor whether there are pedestrians crossing the road. Once a pedestrian crossing the street is found, the detection radar acquires the pedestrian's position coordinates, speed and occlusion point in real time coordinates of the location and transmit the above information to the on-board controller.
[0083] As an early warning information processing module, the on-board controller is used to obtain the current position coordinates and speed of the conflicting vehicle in real time and receive the collected information sent by the above-mentioned radar monitor, process the obtained information and collected informat...
Embodiment 3
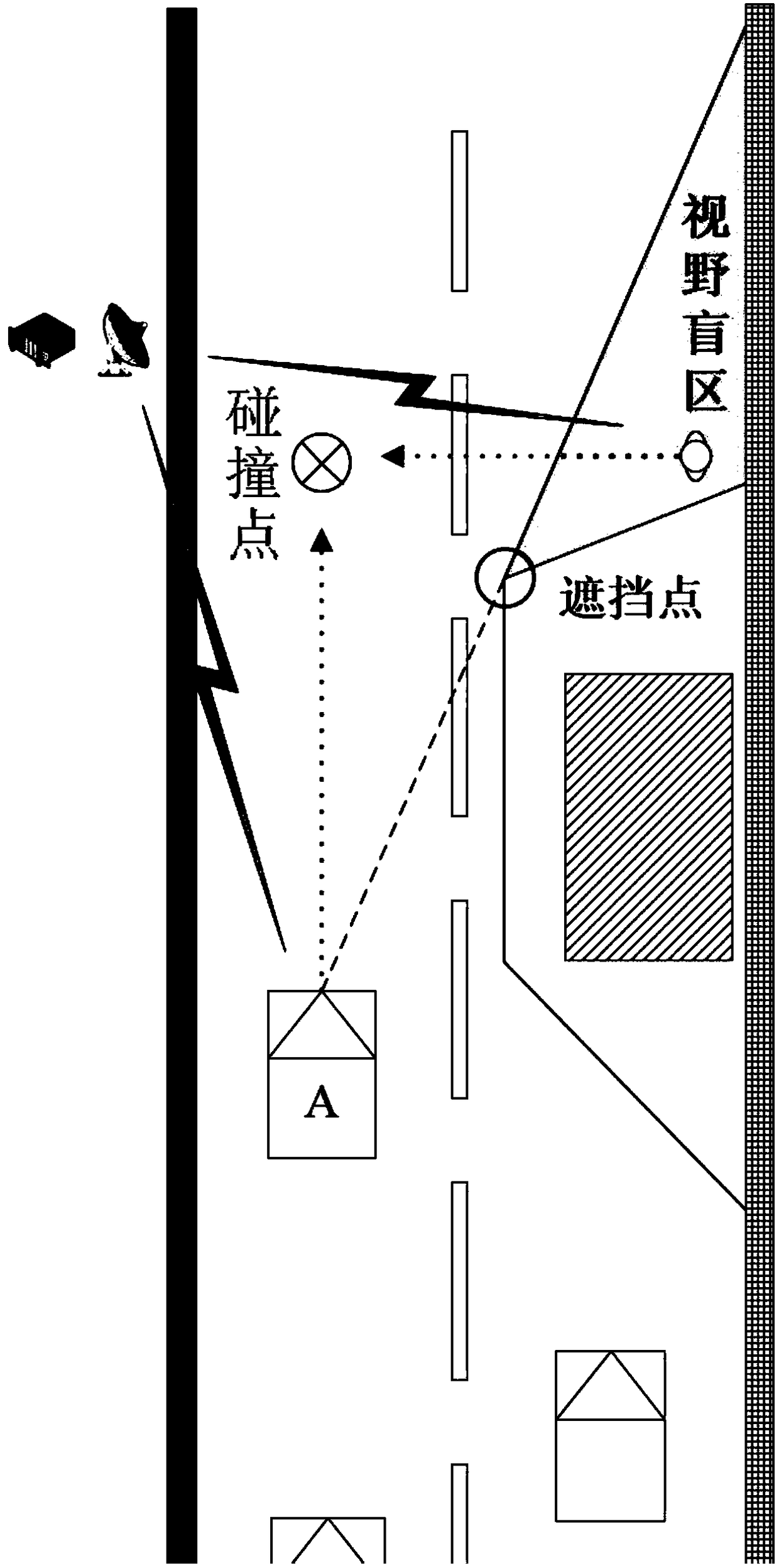
[0093] Such as Figure 3 to Figure 4 As shown, Embodiment 3 of the present invention provides a method for performing collision avoidance warning by using the system as described in Embodiment 2. The method includes the following process steps:
[0094] Step S1: When a pedestrian crossing the street appears, the radar detector activates the central controller and starts to collect the coordinates of the pedestrian's position (X 人 , Y 人 ), pedestrian moving speed v 人 and the position coordinates of the line-of-sight occlusion point (X 盲 , Y 盲 ). In this embodiment, the position of the radar detector is taken as the coordinate origin (X 0 ,Y 0 ).
[0095] Step S2: After the central controller is activated, it starts to receive the information collected by the radar detector, and sends the collected information of pedestrians and occluded points to the vehicle-mounted receiver of the conflicting vehicle.
[0096] Step S3, after the on-board receiver of the vehicle receive...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More