

Self-adaptive kinetic control method of mobile robot
A mobile robot and control method technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of nonlinear susceptibility to external interference, affecting the real-time response of the system, and increasing the complexity of the system, etc., to achieve Improve the accuracy and response speed, maximize the practical value, and overcome the effect of influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
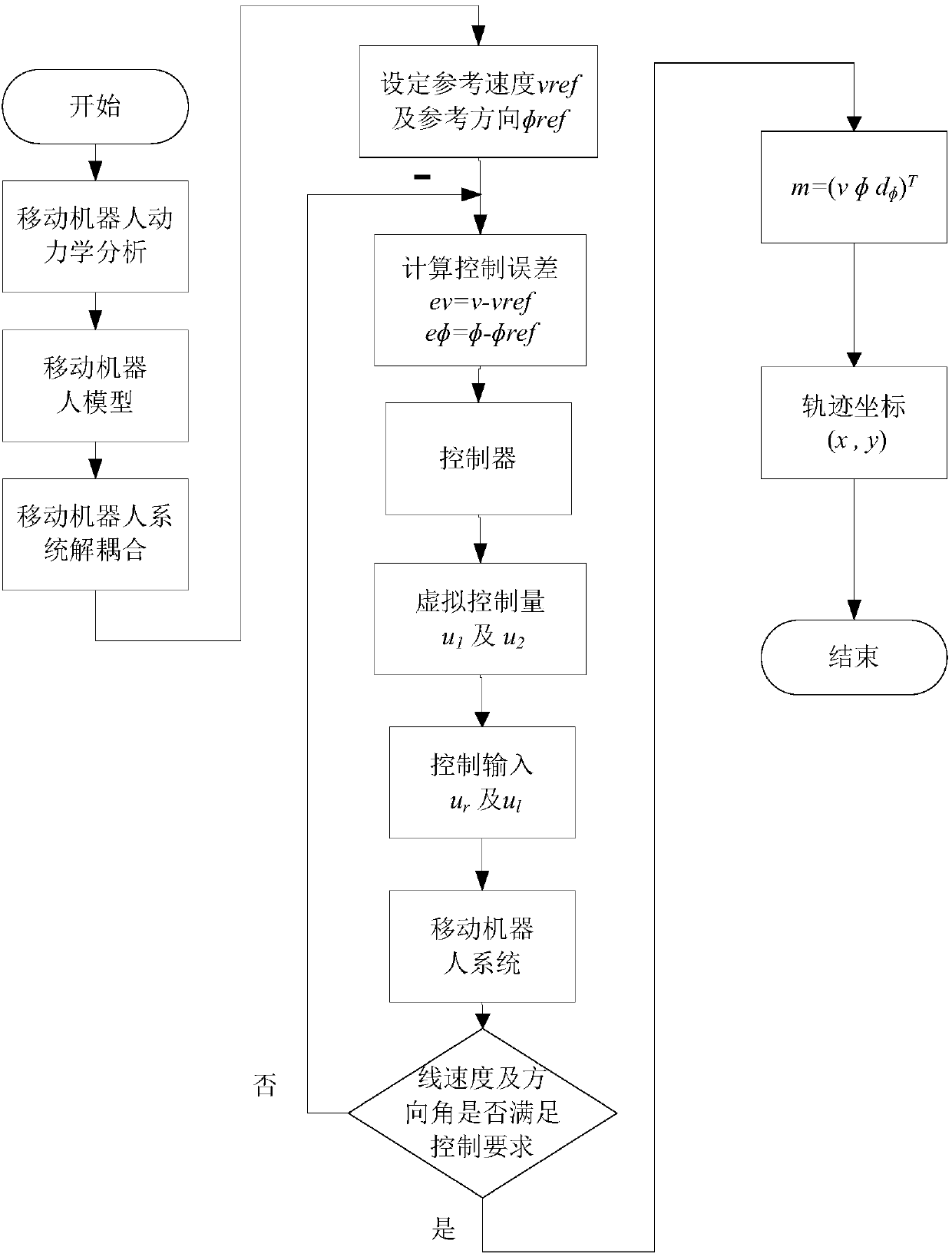
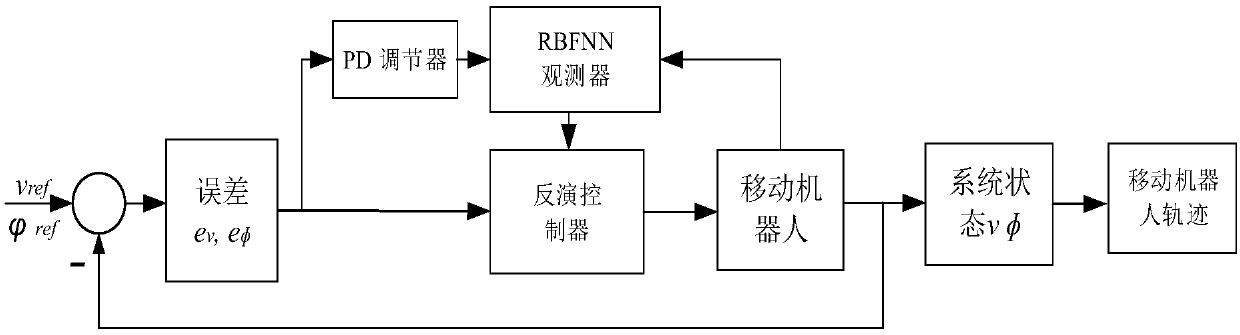
[0076] In a specific embodiment, such as Figure 4 and Figure 5 As shown, the adaptive dynamics control method of the mobile robot is as follows:
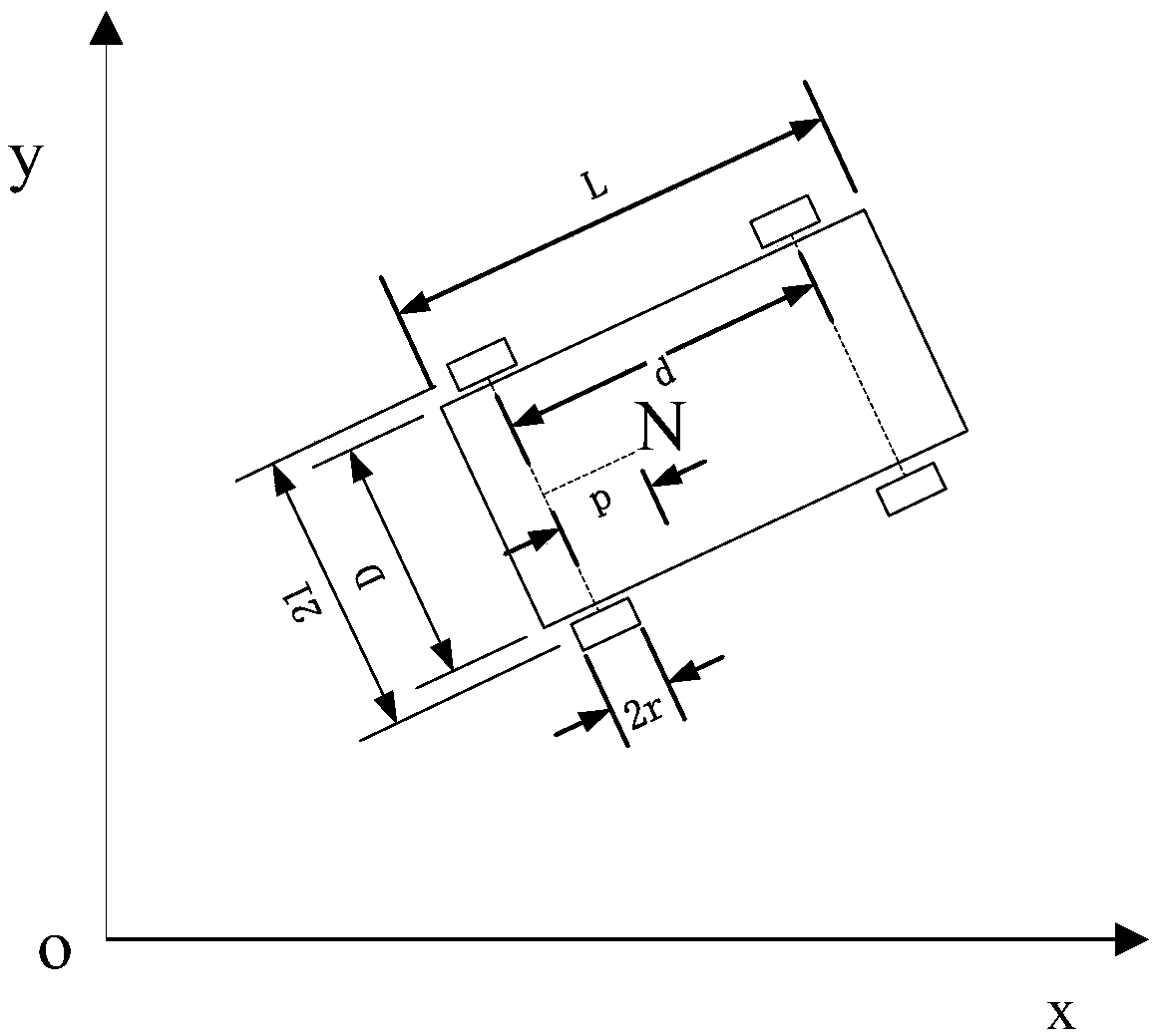
[0077] 1. Establish a dynamic model of the mobile robot under the action of unknown external disturbances, such as image 3 Shown:
[0078] Among them, L is the length of the mobile robot, D is the width of the mobile robot body, d is the center distance between the front and rear wheels, and l is the distance between the centerlines of the left and right wheels. This model adopts the joint drive control of four driving wheels of the robot. In other words, the four wheels of the mobile robot are divided into left and right groups to be controlled respectively (the system output control signals can be respectively sent to the front and rear wheels on the same side). The modeling of the mobile robot considering resistance is as follows:
[0079] according to Figure 4 , the force and moment balance equation is as follows:
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More