

An Efficient Simulation Method for Fluid-Structure Interaction in Complex Scenes Based on Hybrid Physics and Non-Physics
A complex scene, fluid-structure coupling technology, applied in electrical digital data processing, special data processing applications, instruments, etc., can solve problems such as the limitation of fluid-structure coupling simulation calculation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
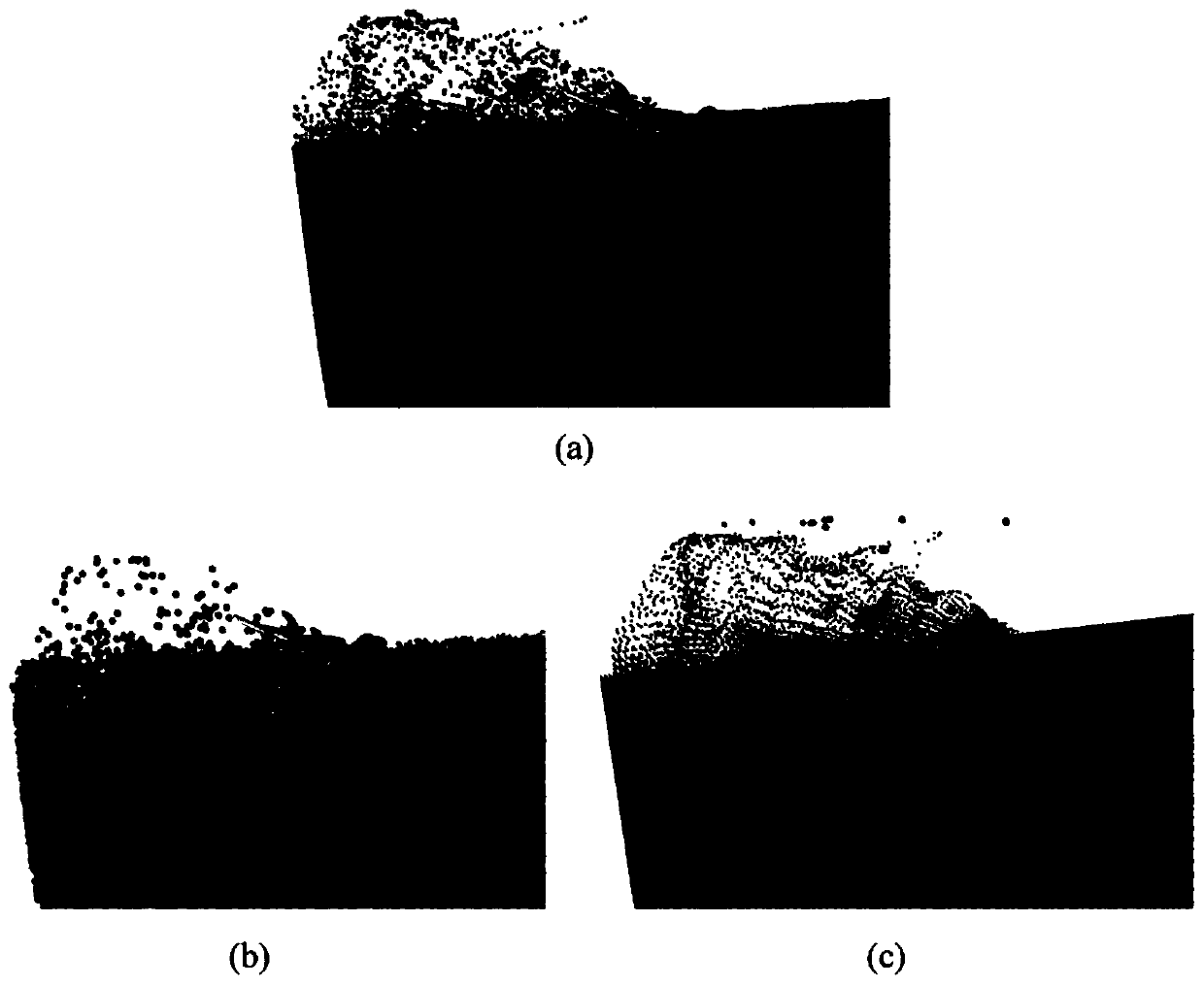
[0117] This embodiment is mainly used to illustrate the advantages of step 1) fluid simulation.
[0118] During the high-efficiency simulation of fluid-solid coupling in the present invention, at first the fluid is discretized into 2 kinds of particles: DFSPH particles and FLIP particles; when starting the simulation, the final speed of the last time slice of the FLIP particles in the interpolation neighborhood (during the initial simulation, the last time slice The final velocity can be selected from the preset initial velocity) to obtain the initial velocity of the DFSPH particle in the current time slice; then, the viscous incompressible fluid is accurately solved by the Divergence-free SPH (DFSPH) method with zero divergence Equation to get the final velocity and position of the DFSPH particles in the current time slice; finally, the final velocity and position of the FLIP particles in the current time slice are obtained by interpolating the final velocity of the DFSPH part...
Embodiment 2
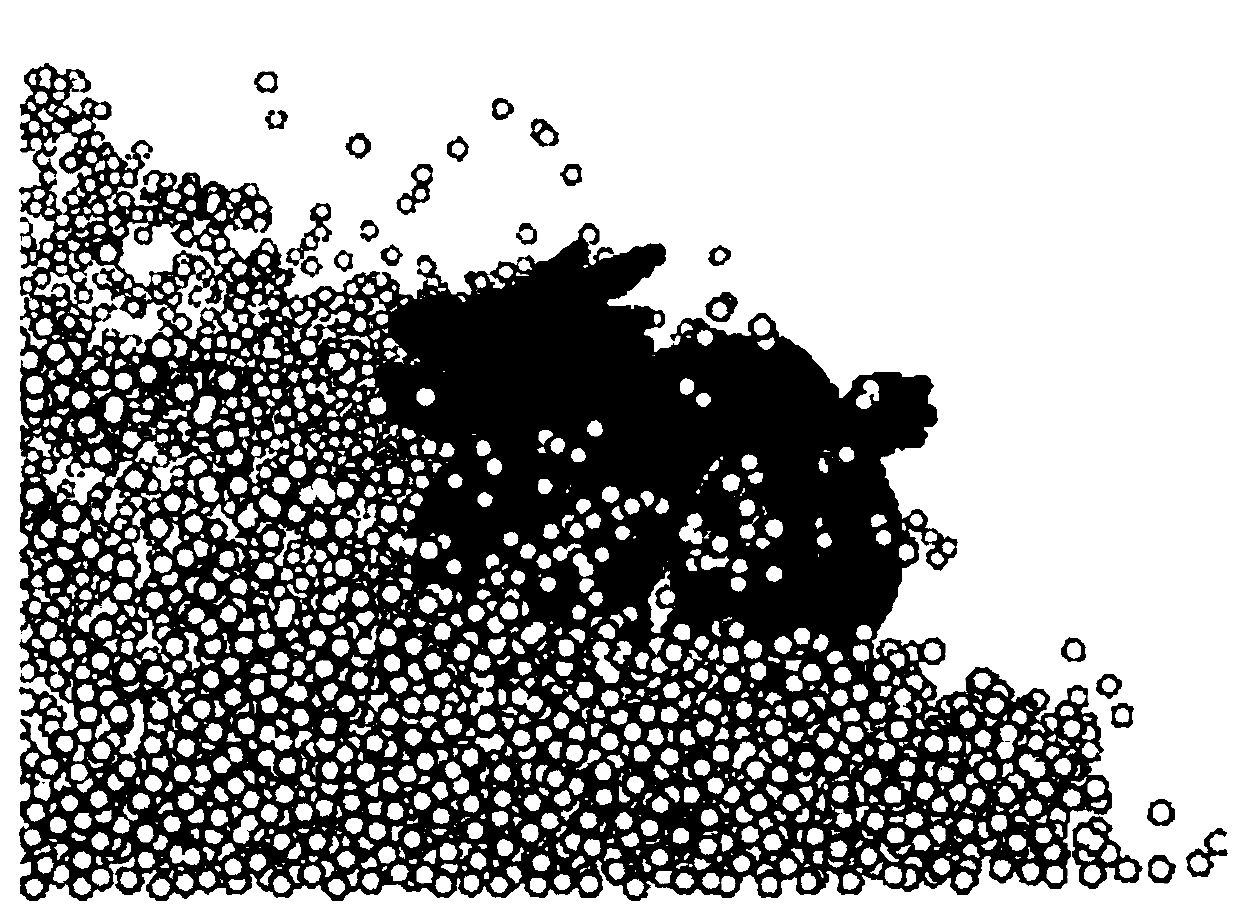
[0158] This embodiment is mainly used to illustrate the advantages of solving the dynamic problem in step 2) fluid-solid coupling.
[0159] In the present invention, during fluid-solid coupling, the rigid body mass is evenly distributed to the rigid body particle collection on the surface of the rigid body; the rigid body particle collection is marked as a special SPH particle and added to the DFSPH particle collection in 1); by accumulating the rigid body particle collection The final position, velocity and rotation of the rigid body in the current time slice are obtained by solving the force and torque vectors; the position and velocity of the fluid particles are updated by the straight tree method to prevent penetrating the surface of the rigid body. The specific implementation process of this step is:
[0160] (16) Use the Poisson disk method to sample the surface of the rigid body to obtain the rigid body particle l;
[0161] (17) Mark the rigid body particle l as a spec...
Embodiment 3
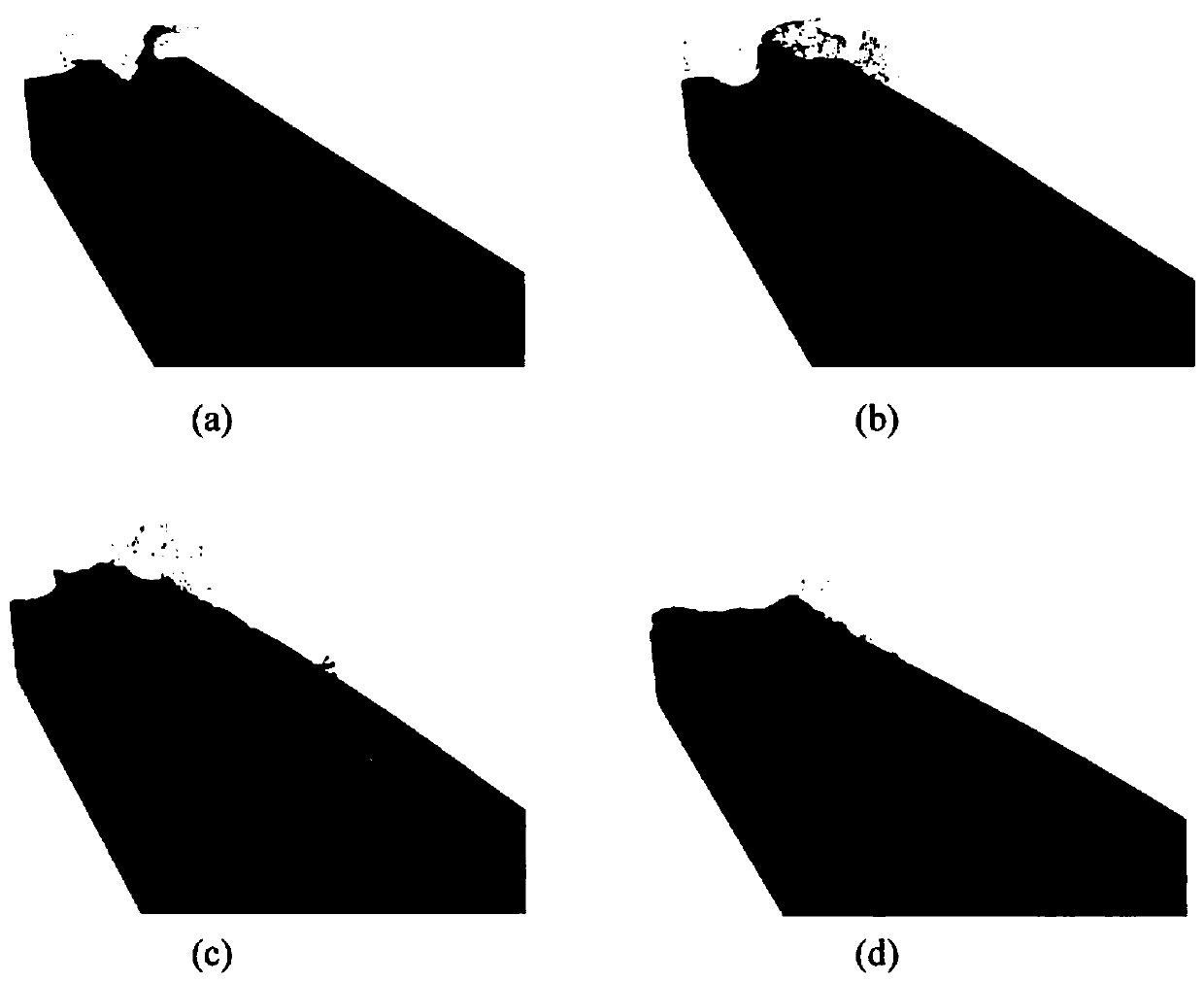
[0191] This embodiment is mainly used to illustrate the technical effect that step A) can produce. This step is only performed when there is a solid that needs to be broken in the simulation scene (such as a dam that is broken after being hit by water, etc.), and it does not need to be performed if there is no such solid in the scene.
[0192] The solid contained in the simulated scene needs to be broken at a predetermined time, so when the predetermined time is reached, step A) is performed before step 2). Step A) is specifically:
[0193] Calculate the strain energy distribution of the solid surface at this moment; calculate all possible central point sets P by minimizing the strain energy distribution through the centroid Voronoi method; finally output the minimized central point set N as the distribution of broken fragments; use the generated fragments as a step 2) Rigid body. The specific implementation of this step is as follows:
[0194] A1) For a solid with a volume ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More