

A Combined Separate Rotor and Foot Mobile Manipulation Robot
A mobile operation, separate technology, applied in the field of mechanism, robotics, aerodynamics, to achieve the effect of good terrain adaptability and dexterous operation ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in further detail below in conjunction with the accompanying drawings.
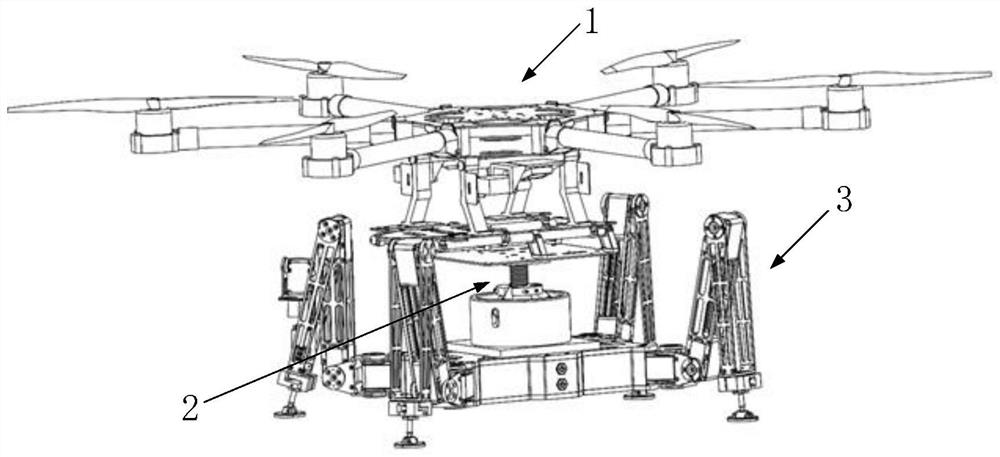
[0032] In the present invention, the combined separated rotor and legged mobile operation robot has a physical and mechanical structure including a multi-rotor flight mechanism 1, a combined separation mechanism 2 and a multi-legged walking operation mechanism 3, such as figure 1 shown. At the same time, the control system and sensing system are built on the basis of the physical and mechanical structure, and power components are configured.
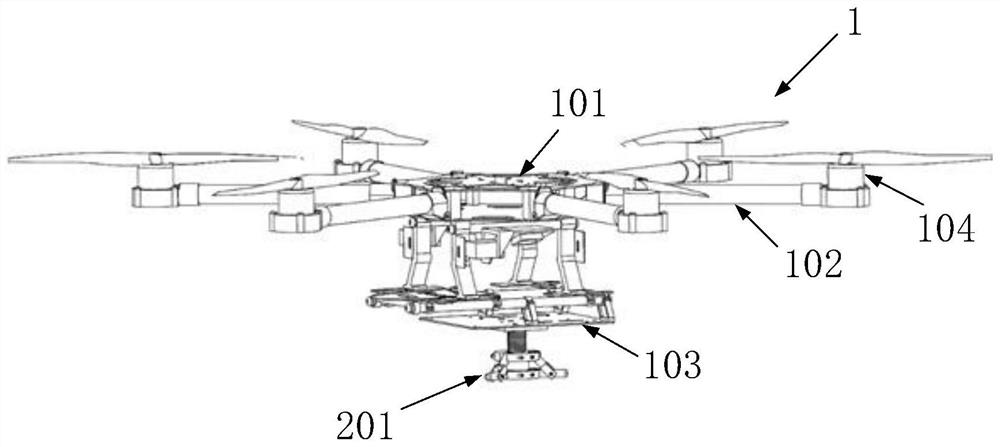
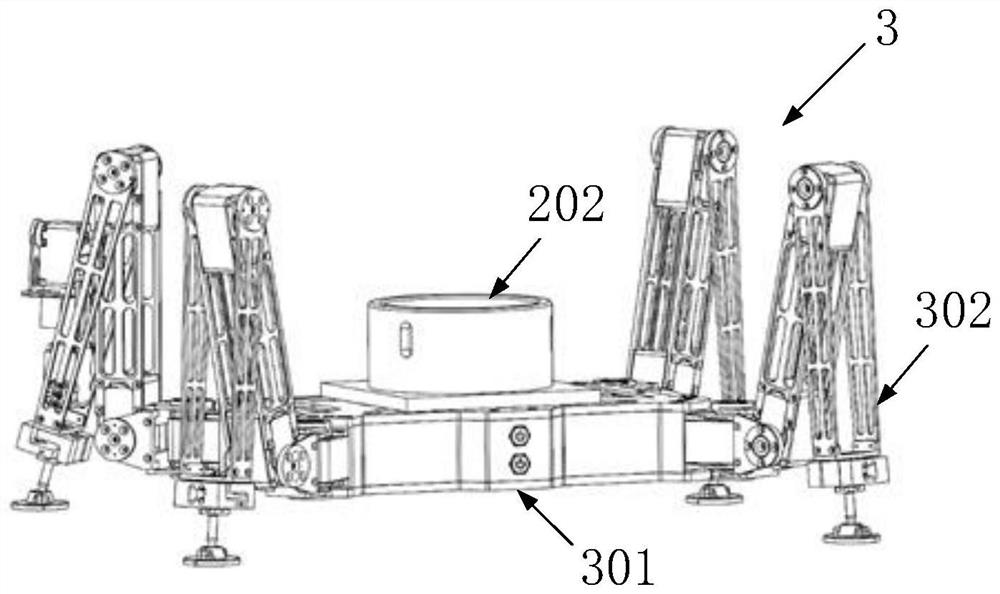
[0033] The multi-rotor flying mechanism 1 covers flying mechanisms such as four-rotor, six-rotor, and octa-rotor; the multi-legged walking operating mechanism 3 covers walking operating mechanisms such as quadrupeds, hexapods, and eight-legged. Here, only the six-rotor flight mechanism and the quadruped leg-arm fusion mechanism are selected for illustration.
[0034] The six-rotor flight mechanism mainly includes a fl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More