

Robot arm, nursing robot system and nursing method of system
A robot system and robotic hand technology, applied in the field of nursing robots, can solve problems such as difficult to meet the daily needs of home or hospital nursing, single function of nursing robots, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
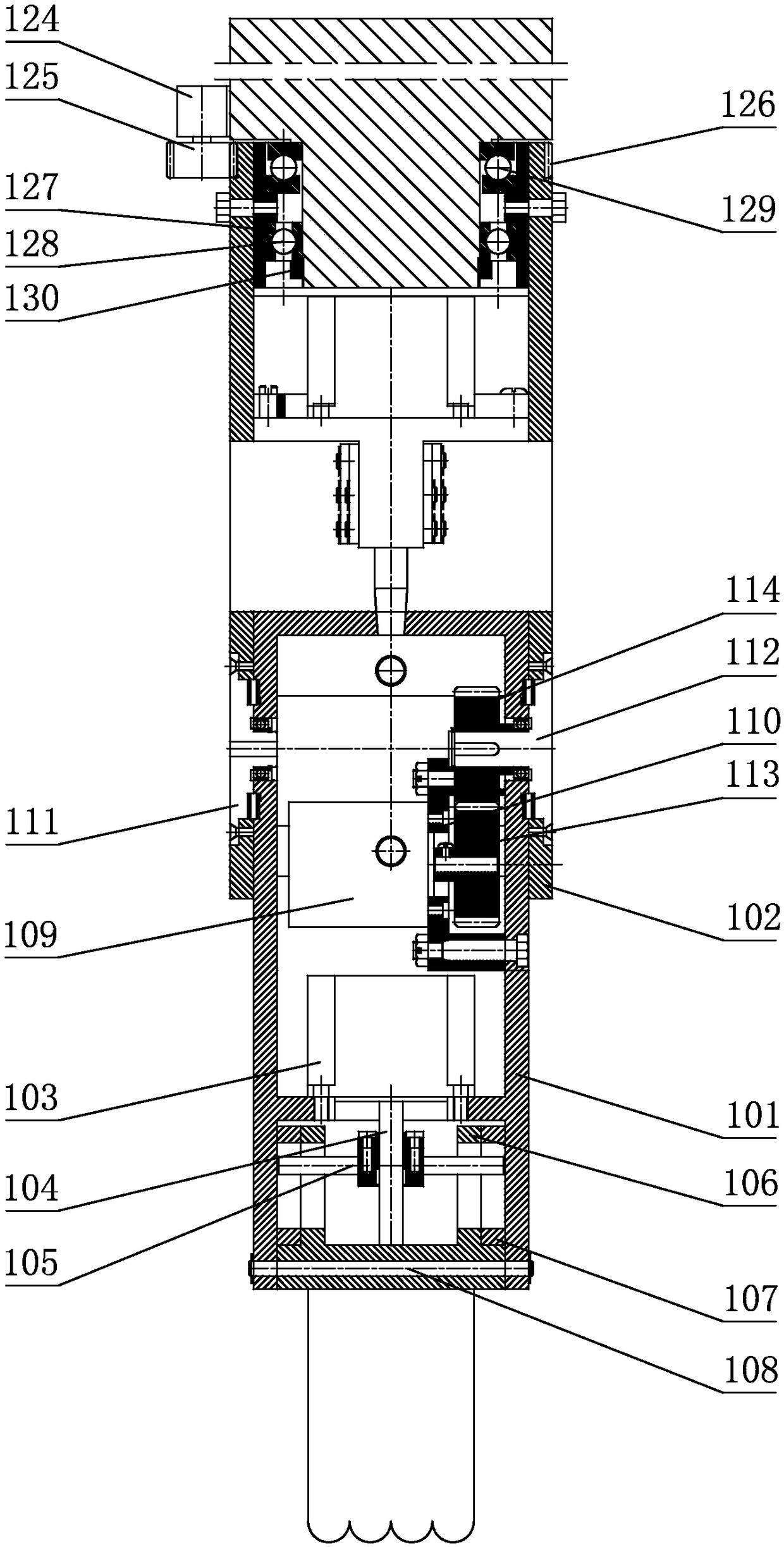
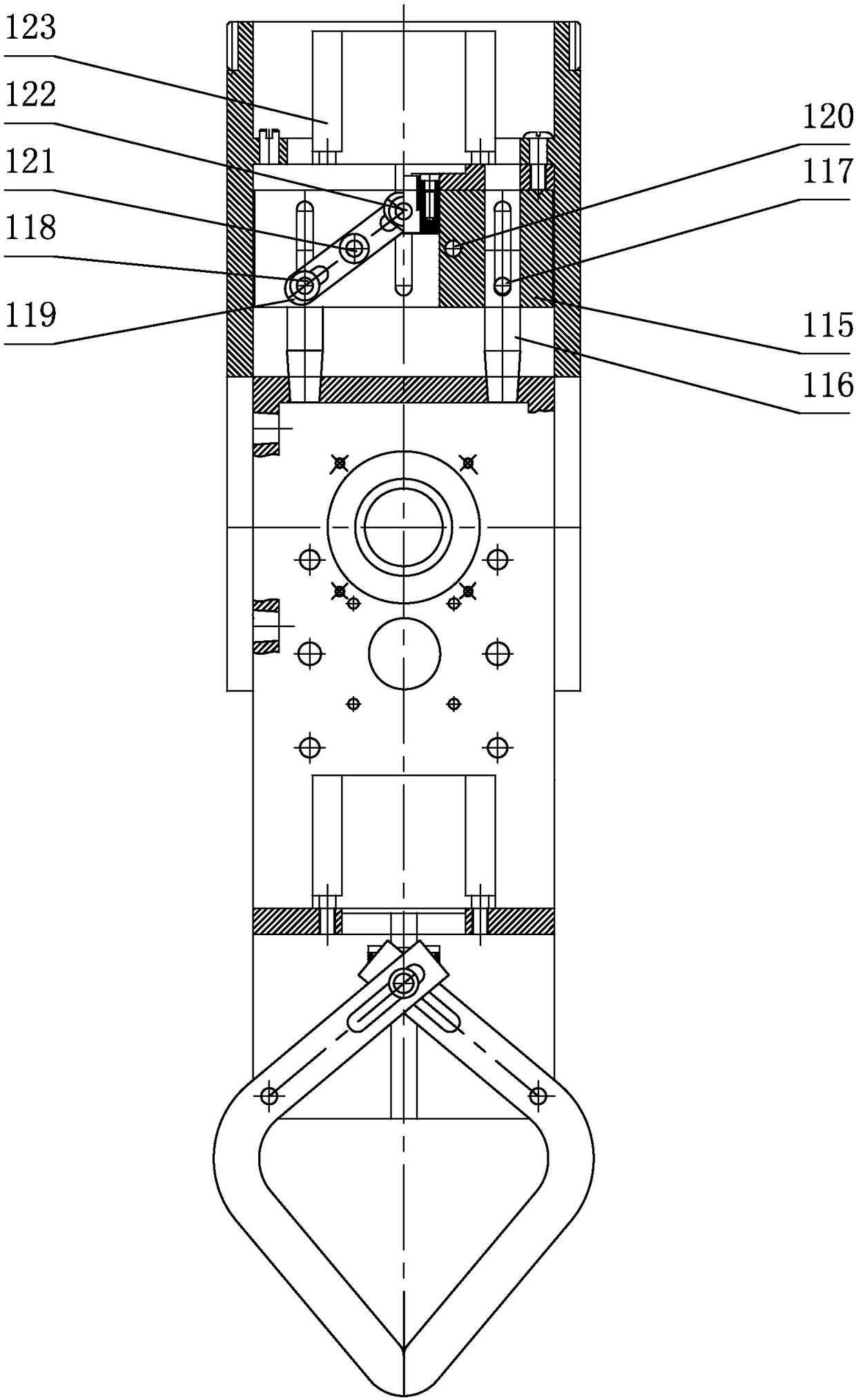
[0034] Specific implementation mode one: combine figure 1 with figure 2 Describe this embodiment, a robot hand for a nursing robot system in this embodiment, the robot hand for a nursing robot system includes an inner box body 101, an outer box body 102, a working assembly, an angular rotation assembly, a brake assembly and a horizontal The rotating assembly, the outer box body 102 and the inner box body 101 are hollow boxes, the lower end of the outer box body 102 is set on the inner box body 101, and the joint of the outer box body 102 and the inner box body 101 is provided with an angle rotation assembly, The inner box body 101 realizes the angular rotation through the angular rotation assembly and the outer box body 102, and the brake brake assembly is installed inside the outer box body 102, and the angular rotation assembly realizes the positioning between the inner box body and the outer box body through the brake brake assembly. The bottom of the inner box body 101 i...
specific Embodiment approach 2
[0035] Specific implementation mode two: combination figure 1 , figure 2 , Figure 11 to Figure 14 Describe this embodiment, the working assembly of this embodiment comprises working motor 103, working screw 104, gripper transmission shaft 105, thumb gripper 106, four-finger gripper 107 and gripper pin 108, and working motor 103 is fixedly installed on On the inner wall of the inner box body 101, the upper end of the working screw 104 is connected with the output shaft of the working motor 103, the gripper drive shaft 105 is fixed on the nut of the working screw 104, the middle part of the thumb gripper 106 and the four-finger gripper 107 The gripper pin shaft 108 is rotationally connected with the inner box body 101, and the tops of the thumb gripper 106 and the four-finger gripper 107 are respectively provided with gripper chutes for sliding engagement with the gripper transmission shaft 105, and the gripper transmission shaft 105 and The thumb gripper 106 and the four-fi...
specific Embodiment approach 3
[0036] Specific implementation mode three: combination figure 1 , figure 2 , Figure 7 to Figure 10Describe this embodiment, the angle rotation assembly of this embodiment includes angle rotation motor 109, angle rotation motor fixing frame 110, short semi-axis 111, long semi-axis 112, first driving gear 113 and first driven gear 114, angle rotation Motor fixed mount 110 is fixedly installed on the top inwall of inner box body 101, and angle rotation motor 109 is installed on the angle rotation motor fixed mount 110, and the first drive gear 113 is installed in the angle rotation motor 109 in angle rotation motor fixed mount 110 On the output shaft, the upper part of the inner box 101 is symmetrically provided with a shaft end passage hole for cooperating with the short semi-axis 111 and the long semi-axis 112, and the short semi-axis 111 and the long semi-axis 112 are coaxially arranged on the inner box 101 and the outer At the junction of the casing 102, the long half sha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More