

Stability control method for multi-delay teleoperation system based on force and position prediction
A stability control and operating system technology, applied in the field of robotics, can solve problems such as the inability to ensure the force tracking performance of the remote operating system, affect the operating performance of the remote operating system, and the time delay of the environmental interaction force, etc., to enhance the sense of on-site experience , Improve location tracking accuracy, improve the effect of tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
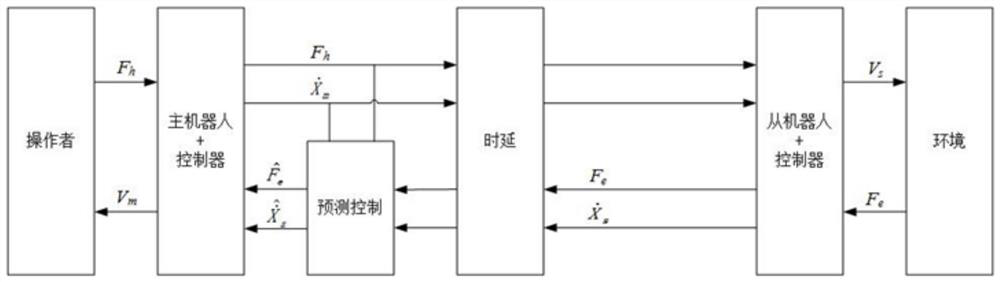
[0049] figure 1 It is a schematic diagram of a multi-delay teleoperation system stability control method based on force and position prediction.
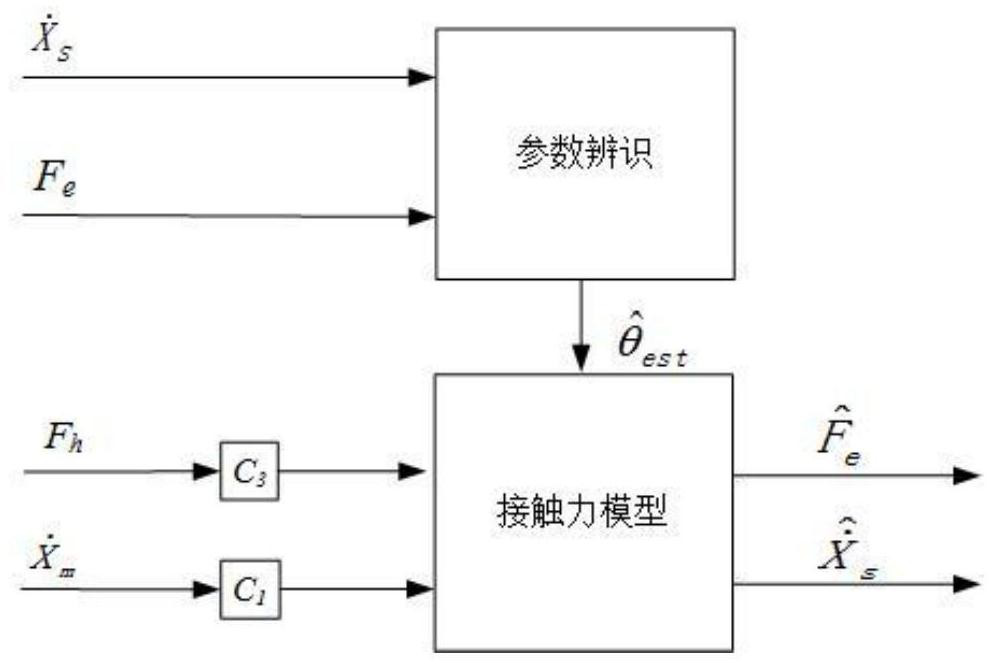
[0050] In this example, if figure 1 As shown, the multi-delay teleoperation system includes an operator module, a master robot, a master robot controller, a predictive control module, a communication channel, a slave robot, a slave robot controller, and an environment module. In this embodiment, the contact force model when the slave robot interacts with the environment is established on the master robot side.
[0051] Combine below figure 1 , a method for controlling the stability of a multi-delay remote operating system based on force and position prediction in the present invention is described in detail, which specifically includes the following steps:
[0052] S1. Estimate the environmental stiffness parameter K of the environment in contact with the robot c and the ambient damping parameter B c
[0053] S1.1. According to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More