Robot teaching method and system based on vision system
A technology of vision system and teaching method, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of low teaching accuracy, large time and energy consumption, and high skill level requirements, and achieves high teaching efficiency. , trajectory optimization and accurate effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings.
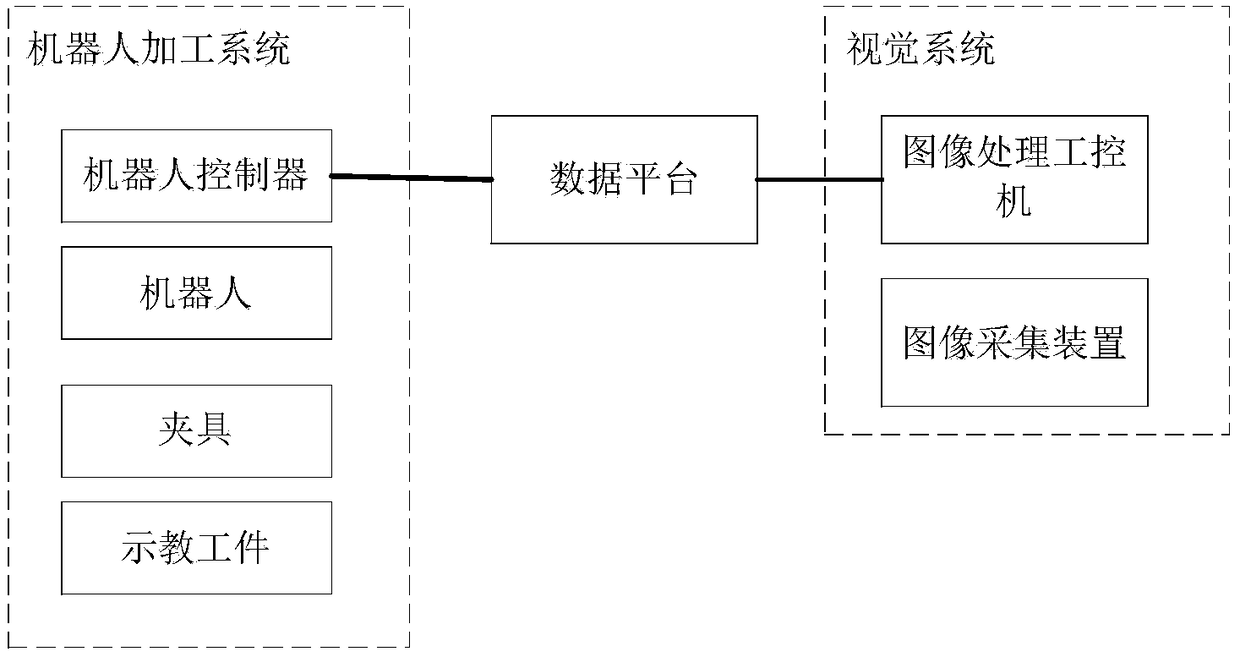
[0020] A robot teaching method based on a vision system, which uses the collection and analysis of the vision system and the matching optimization of the data platform to eliminate the equipment installation error in the offline program teaching of the robot. The specific steps are as follows:
[0021] Step 1, offline program design, based on the 3D digital-analog dynamic simulation of the robot processing system to generate the robot offline program;
[0022] Step 2, equipment installation, install the robot and fixture installation design data in place; import the offline program into the robot controller;
[0023] Step 3, rough trajectory operation, control the robot to run according to the trajectory provided by the offline program;
[0024] Step 4, image acquisition, the vision system moves along the ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com