

Dynamic path planning method of robot by combining A* algorithm and VFH obstacle avoiding algorithm
A dynamic path and robot technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as inability to adapt to changing environments, difficult path planning, lack of global information, etc., to ensure autonomous navigation Power, small amount of calculation, and the effect of improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
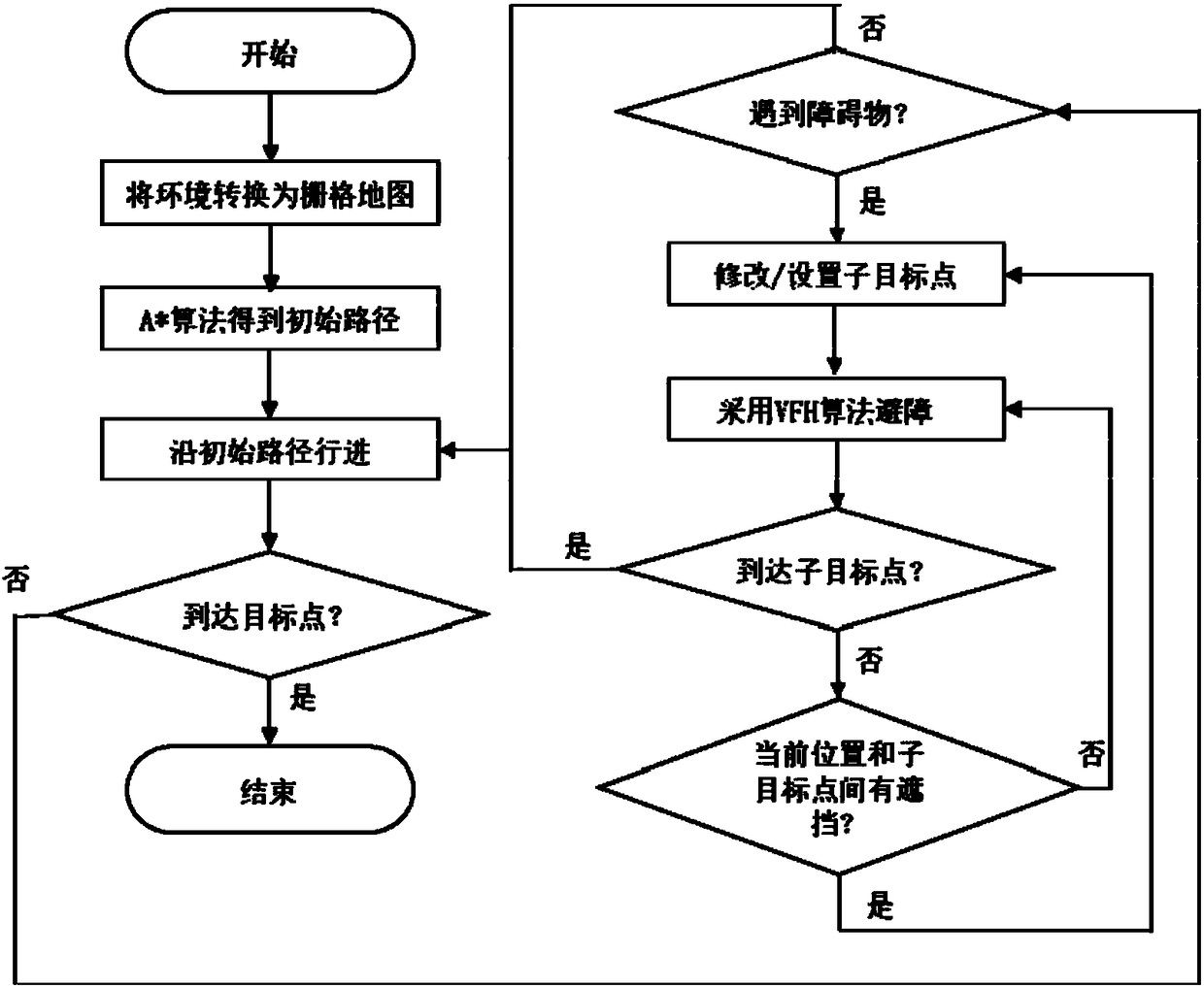
[0056] Embodiment: robot path planning method, concrete steps are as follows:
[0057] 1. Express the environment of the robot with the grid method, and use the A* algorithm to plan an initial path from the starting point to the target point. The environmental information is converted into a two-dimensional grid. A value of 0 in the grid indicates that there are no obstacles, and a value of 1 indicates that there are obstacles. The position of the robot in the grid map is the starting point, and the target point is artificially designated for it. Through the A* algorithm, use the global information and the coordinates of the starting point and the target point to plan an initial path, which is stored in the form of a linked list.
[0058] 2. The robot moves along the initial path.
[0059] Convert the initial path obtained in step 1 into the linear velocity and angular velocity of the robot, and send it to the control unit of the robot, so that the robot moves strictly accor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More