

Enhanced coupling nonlinear pd sliding mode controller and method for bridge crane system
A technology of bridge cranes and controllers, which is applied to cranes and other directions, can solve problems such as unfavorable engineering realization, chattering phenomenon, complex controller structure, etc., and achieve the effect of improving transient control performance, simple structure, and strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with accompanying drawing.
[0047] 1. Dynamic model of the two-stage pendulum bridge crane system
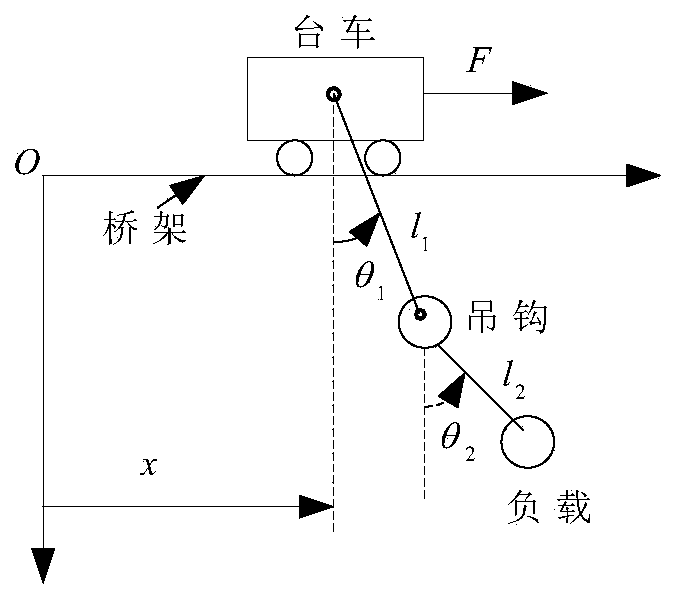
[0048] Two-stage pendulum bridge crane system such as figure 1 As shown, the dynamic model is:
[0049]
[0050]
[0051]
[0052] Among them, C 1 , S 1 , S 1-2 , C 1-2 represent cosθ respectively 1 , sinθ 1 , sin(θ 1 -θ 2 ), cos(θ 1 -θ 2 ) abbreviation; M, m 1 , m 2 represent the mass of the trolley, the mass of the hook and the mass of the load respectively; x, θ 1 , θ 2 are the displacement of the trolley, the swing angle of the hook and the swing angle of the load; l 1 , l 2 respectively represent the length of the sling and the distance between the center of gravity of the load and the center of gravity of the hook; g is the acceleration of gravity; d, F rx Respectively represent the external disturbance and friction; F is the driving force applied to the trolley.
[0053...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More