

Method for laser radar navigation of four-rotor aircraft in continuous multilateral geometric environment
A quadrotor aircraft, lidar technology, applied in the direction of navigation, navigation, mapping and navigation through speed/acceleration measurement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
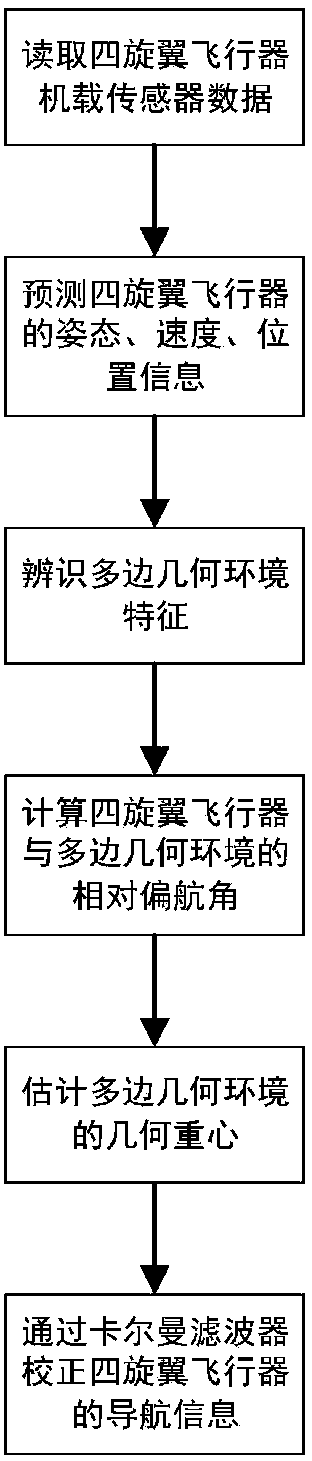
[0113] like figure 1 Shown, the concrete steps of the present invention are as follows:
[0114] Step (1): Periodically read the sensor information of the quadrotor aircraft at time k, including lidar information S(k), gyroscope information accelerometer information Barometric altimeter information h b (k);
[0115] Step (2): Predict the attitude, speed, and position of the quadrotor aircraft at time k through the inertial sensor, the specific method is as follows:
[0116] (2.1) The attitude quaternion prediction adopts the following formula:
[0117]
[0118] Among them, Q(k)=[q o (k)q 1 (k)q 2 (k)q 3 (k)] T Be the posture quaternion of k moment, superscript T represents the transposition of matrix;; Q(k-1)=[q o (k-1)q 1 (k-1)q 2 (k-1)q 3 (k-1)] T is the attitude quaternion at k-1 moment; ΔT is the discrete sampling period; Calculated by the following formula:
[0119]
[0120] in Calculated by the following formula:
[0121]
[0122] in, is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More