

Four-rotor aircraft flight control method based on backstepping method
A four-rotor aircraft and flight control technology, applied in attitude control, control/regulation system, non-electric variable control, etc., can solve problems such as potential safety hazards, poor performance of conventional controllers, and poor control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
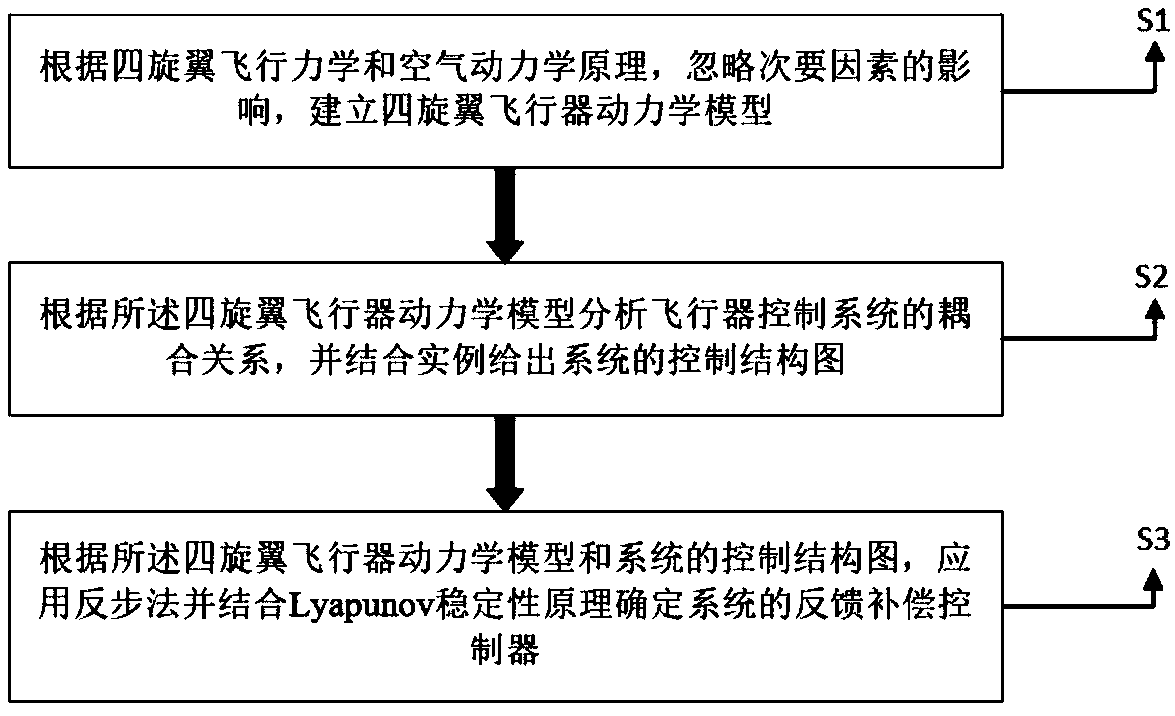
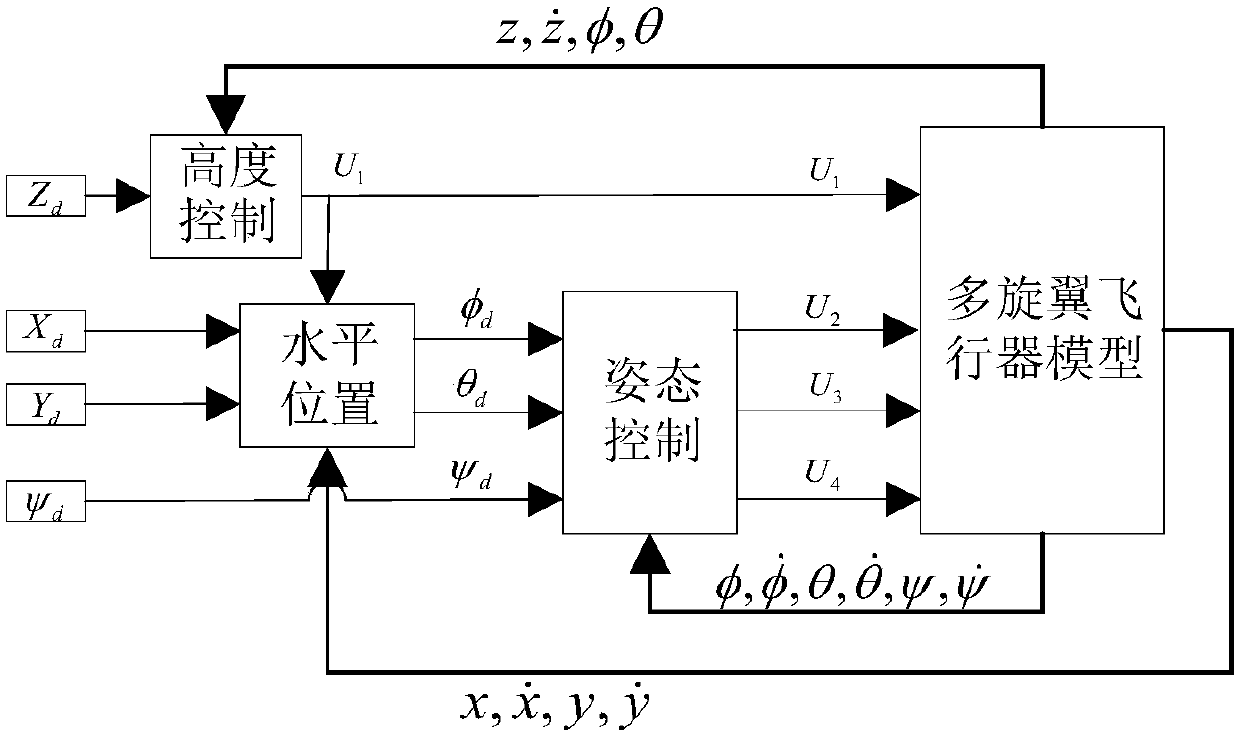
[0132] The four-rotor drone flight control method based on the anti-stepping method described in the embodiment of the present invention first establishes a quad-rotor aircraft model based on the principles of quad-rotor flight mechanics and aerodynamics, ignoring the influence of secondary factors, and then The dynamic model of the quadrotor aircraft analyzes the coupling relationship of the aircraft control system, and the control structure diagram of the system is given based on the example. Finally, according to the dynamic model of the quadrotor aircraft and the control structure diagram of the system, the backstepping method is applied and combined with Lyapunov stability The principle of performance determines the feedback compensation controller of the system. This can reduce the interference caused by strong coupling, external interference and uncertainty to the flight process, improve the control accuracy and control performance of the quadrotor model, thereby improvin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More