

Unmanned aerial vehicle navigation decoy device and method based on flight destination prediction
A decoy device, UAV technology, applied in three-dimensional position/channel control, vehicle position/route/altitude control, instruments and other directions, can solve the problem of inability to dynamically adjust decoy signal parameters, UAV out of control, etc., to reduce disposal cost, avoidance of collateral damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in detail below in conjunction with specific examples and accompanying drawings.
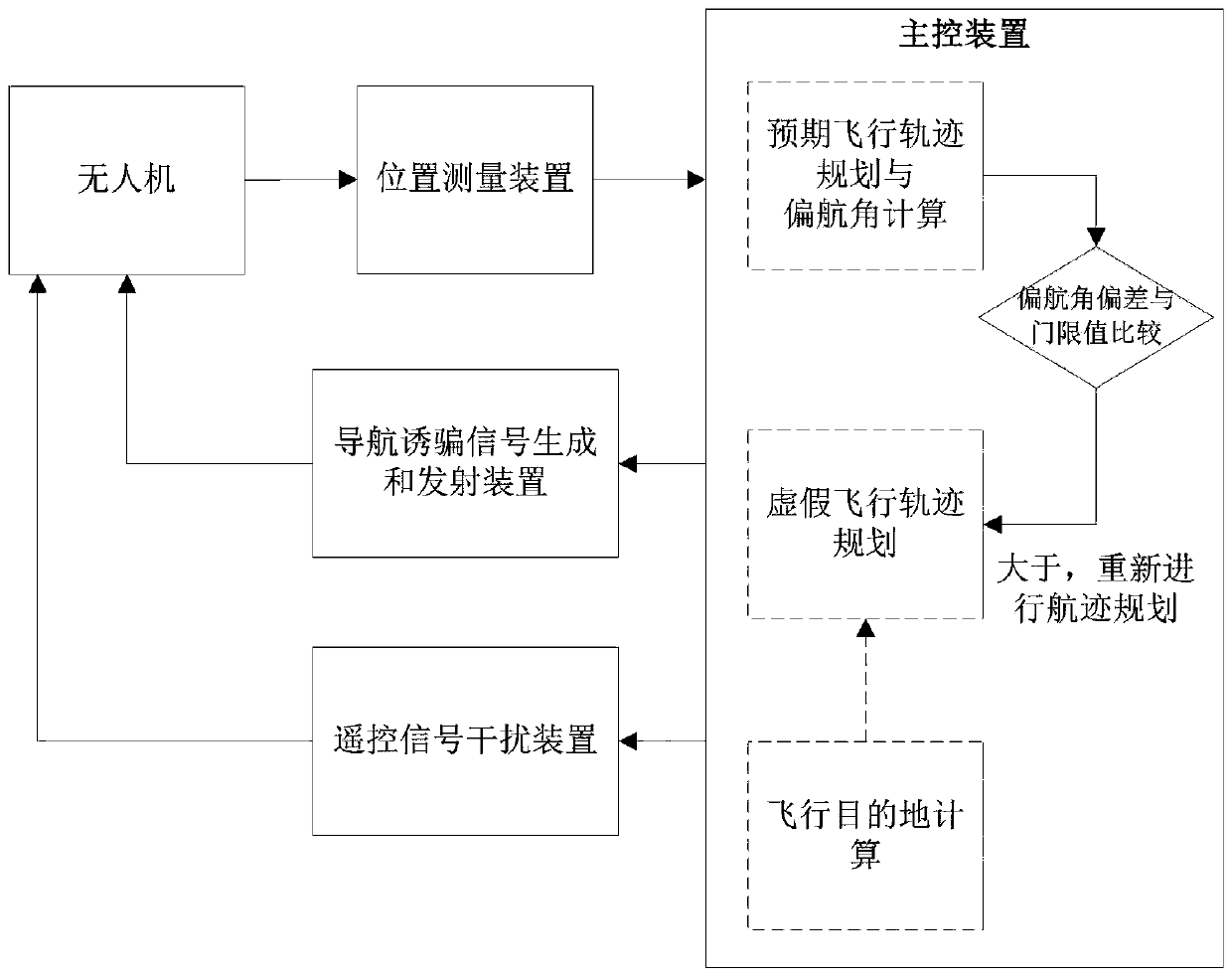
[0036] Such as figure 1 As shown, according to one aspect of the present invention, a UAV navigation decoy device based on flight destination prediction includes a main control device, a navigation decoy signal generating and transmitting device, a position measuring device and a remote control signal interference device;
[0037] The main control device is used for UAV flight destination calculation, trajectory planning and yaw angle calculation, and is used to control the remote control signal interference device, position measurement device and navigation decoy signal generation and launch device;
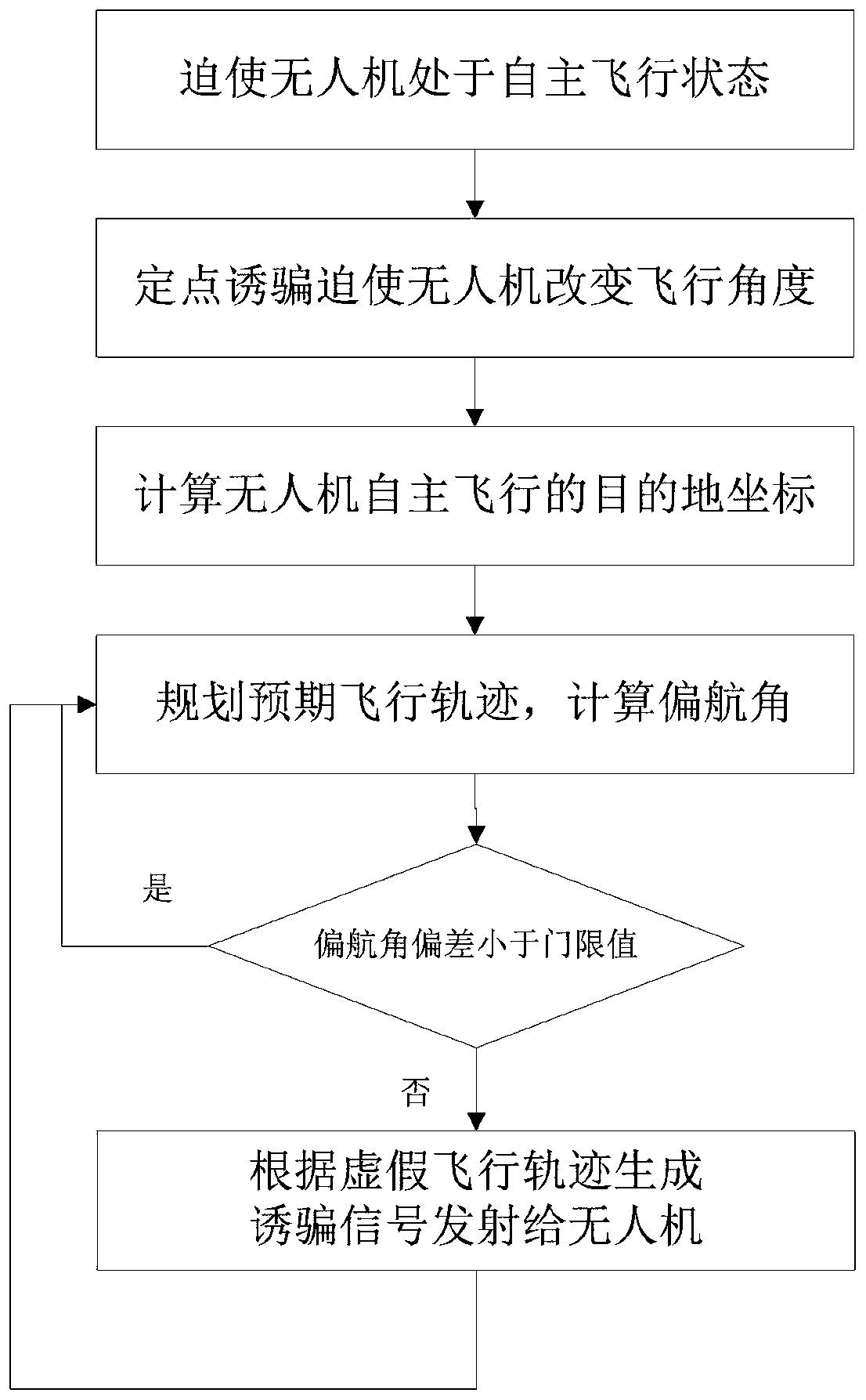
[0038] The remote control signal jamming device is used to block the remote control signal of the drone, forcing the drone to be in an autonomous flight state and get rid of human operation;
[0039] The position measurement device periodically trans...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More