

Quick and robust RGB-D indoor three-dimensional scene reconstruction method
An RGB-D, three-dimensional scene technology, applied in the field of three-dimensional reconstruction, can solve the problem that the reconstruction efficiency of indoor three-dimensional scene cannot meet the demand, and achieves improved tracking robustness, reduced speed and model accuracy, good robustness and scalability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] Preferred embodiments of the present invention are described below with reference to the accompanying drawings. Those skilled in the art should understand that these embodiments are only used to explain the technical principles of the present invention, and are not intended to limit the protection scope of the present invention.
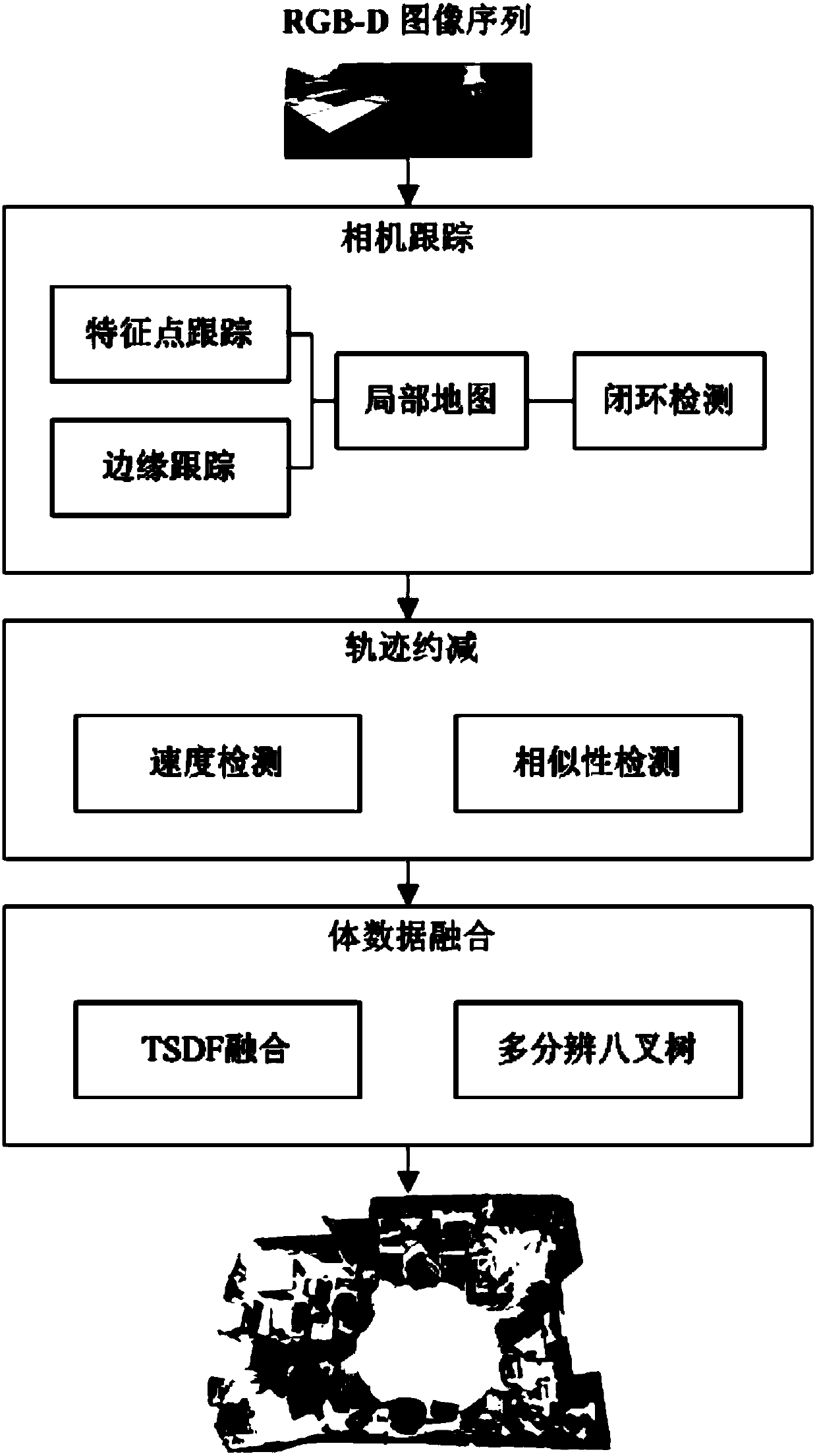
[0074] The fast and robust RGB-D indoor three-dimensional scene reconstruction method of the embodiment of the present invention, such as figure 1 shown, including the following steps:
[0075] Use RGB-D camera to scan indoor scenes in real time;
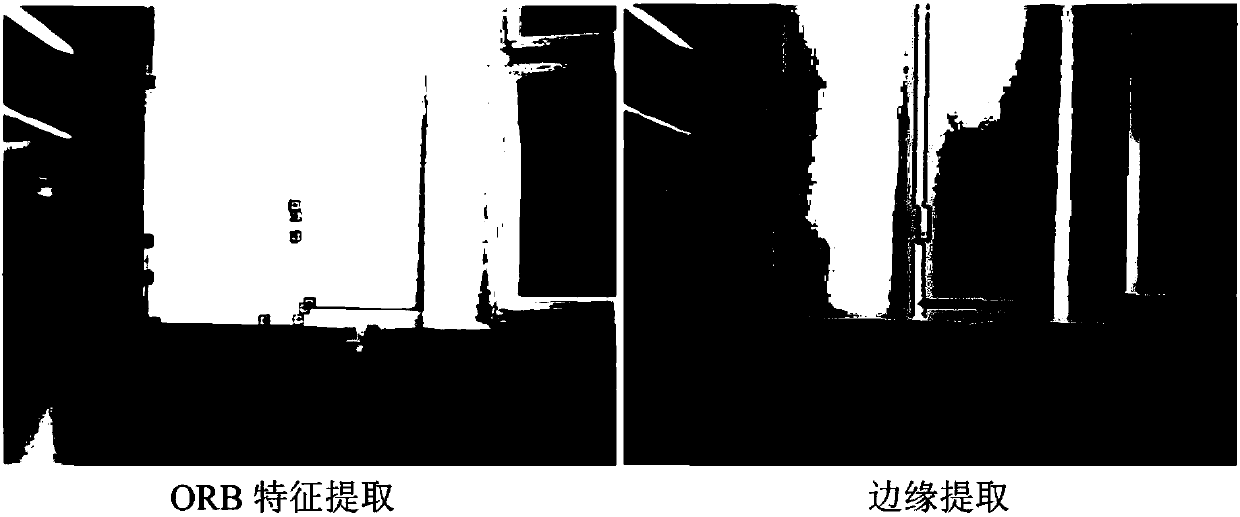
[0076] Real-time camera tracking based on point-line fusion camera tracking algorithm;
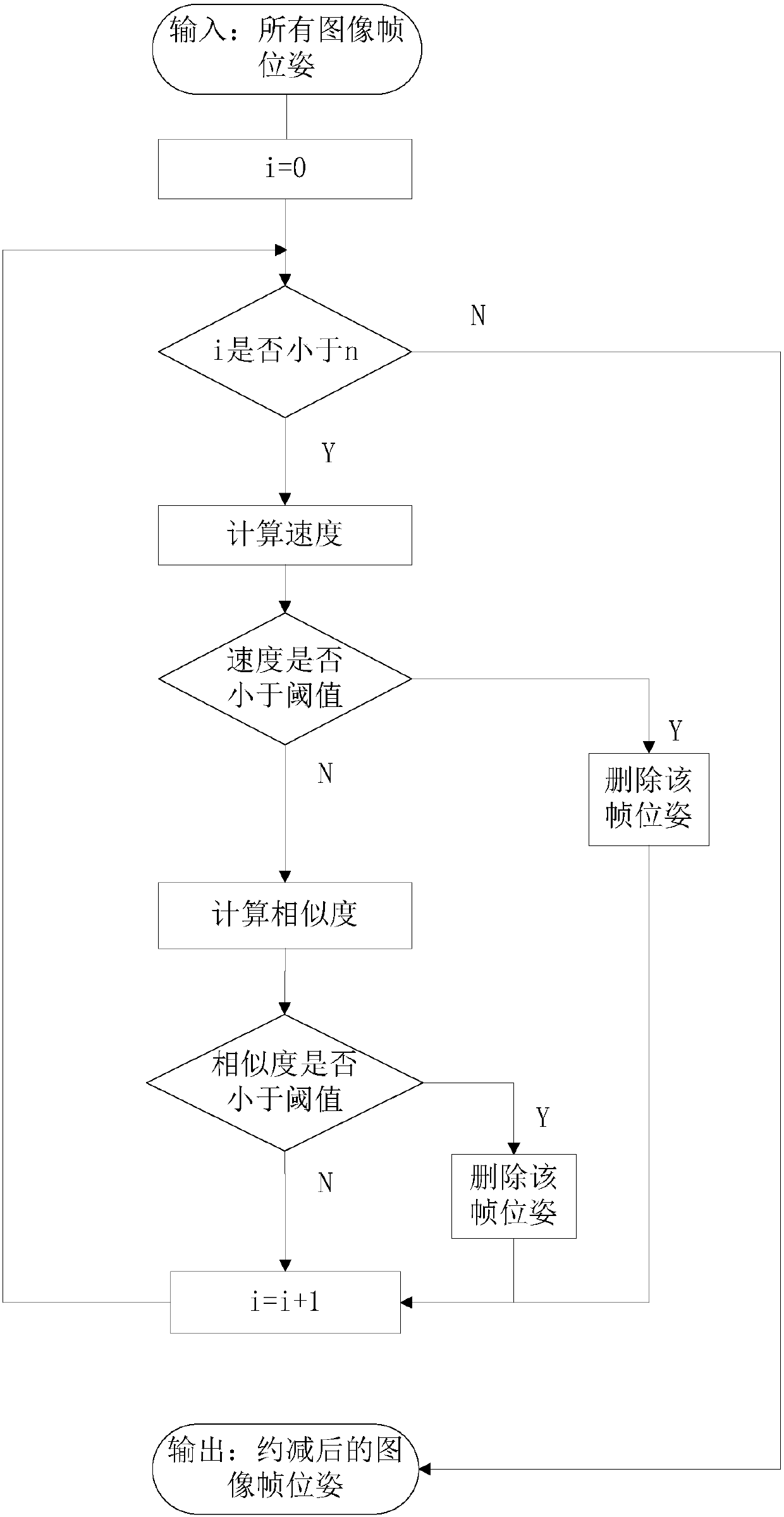
[0077] The camera trajectory is reduced by detecting the camera state;
[0078] Using the reduced camera trajectory information, the RGB-D image is fused with multi-scale volume data to generate a complete 3D model of the scene.
[0079] According to the above method, the present invention can be divided int...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More