

Control system and method of robot
A control system and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as no solutions, large limitations of robot control systems, and difficulty in meeting the development needs of industrial robots, and achieves solutions with large limitations, Meet the effects of portability and scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
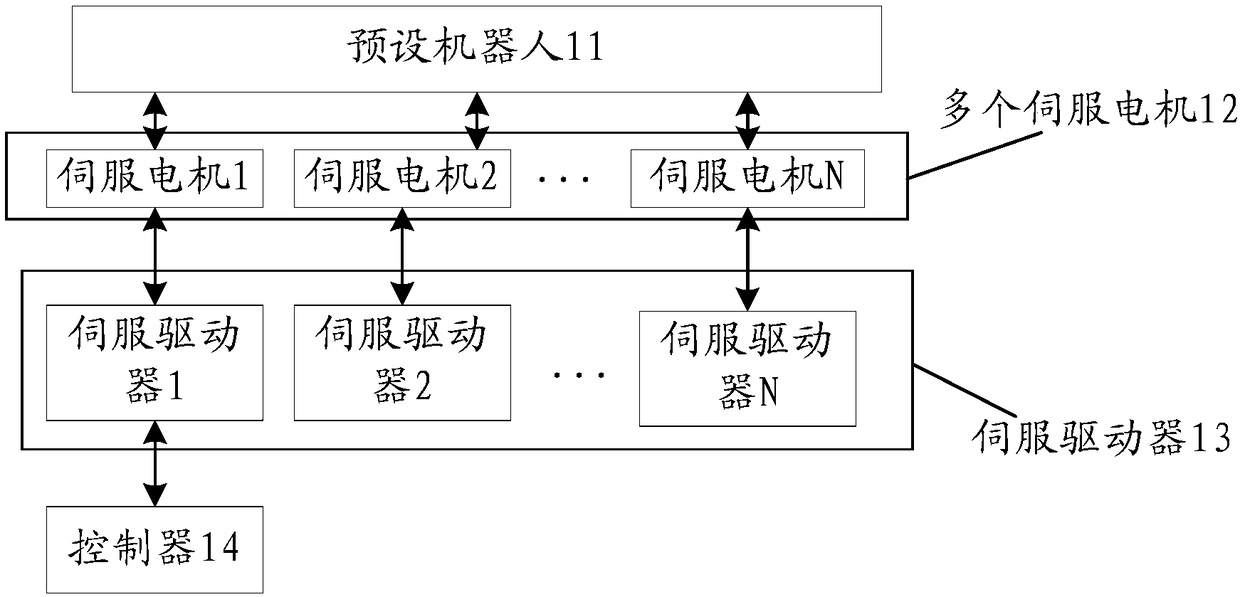
[0035] figure 1 is a schematic diagram of a robot control system according to an embodiment of the present invention, and the control system performs control through an Ethernet control bus, such as figure 1 As shown, the control system includes:
[0036] A robot 11, a plurality of servo motors 12, a servo driver 13 and a controller 14 corresponding to each servo motor are preset, wherein, after receiving a motion instruction, the operating parameters of each servo driver 13 are determined, wherein the motion instruction is Sent by the controller 14, the operating parameters at least include: controlling the motion parameters of the trajectory position and trajectory posture of the preset robot; adjusting the operation of multiple servo motors 12 according to the motion parameters of the preset trajectory position and trajectory posture of the robot 11 According to the adjustment result, the preset robot is driven to move according to the target trajectory.
[0037] Wherein,...
Embodiment 2
[0064] According to an embodiment of the present invention, an embodiment of a robot control method is provided. It should be noted that the steps shown in the flowcharts of the drawings can be executed in a computer system such as a set of computer-executable instructions, and, although A logical order is shown in the flowcharts, but in some cases the steps shown or described may be performed in an order different from that shown or described herein.
[0065] Figure 4 It is a flow chart of a robot control method according to an embodiment of the present invention, which is applied to any of the above control systems, such as Figure 4 As shown, the method includes the following steps:
[0066] Step S102, receiving a motion command, wherein the motion command is used to control the preset robot to move from an initial track point to a target track point.
[0067] Optionally, the movement instruction can be sent by the controller or the teaching pendant, and the preset robot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More