

Complex area tour robot positioning, navigation and time service method under non GPS condition
A robot positioning and robot technology, used in navigation and timing, complex area patrol robot positioning, PNT field, can solve the problem of unable to accurately position and navigate, unable to obtain robot attitude and position information, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
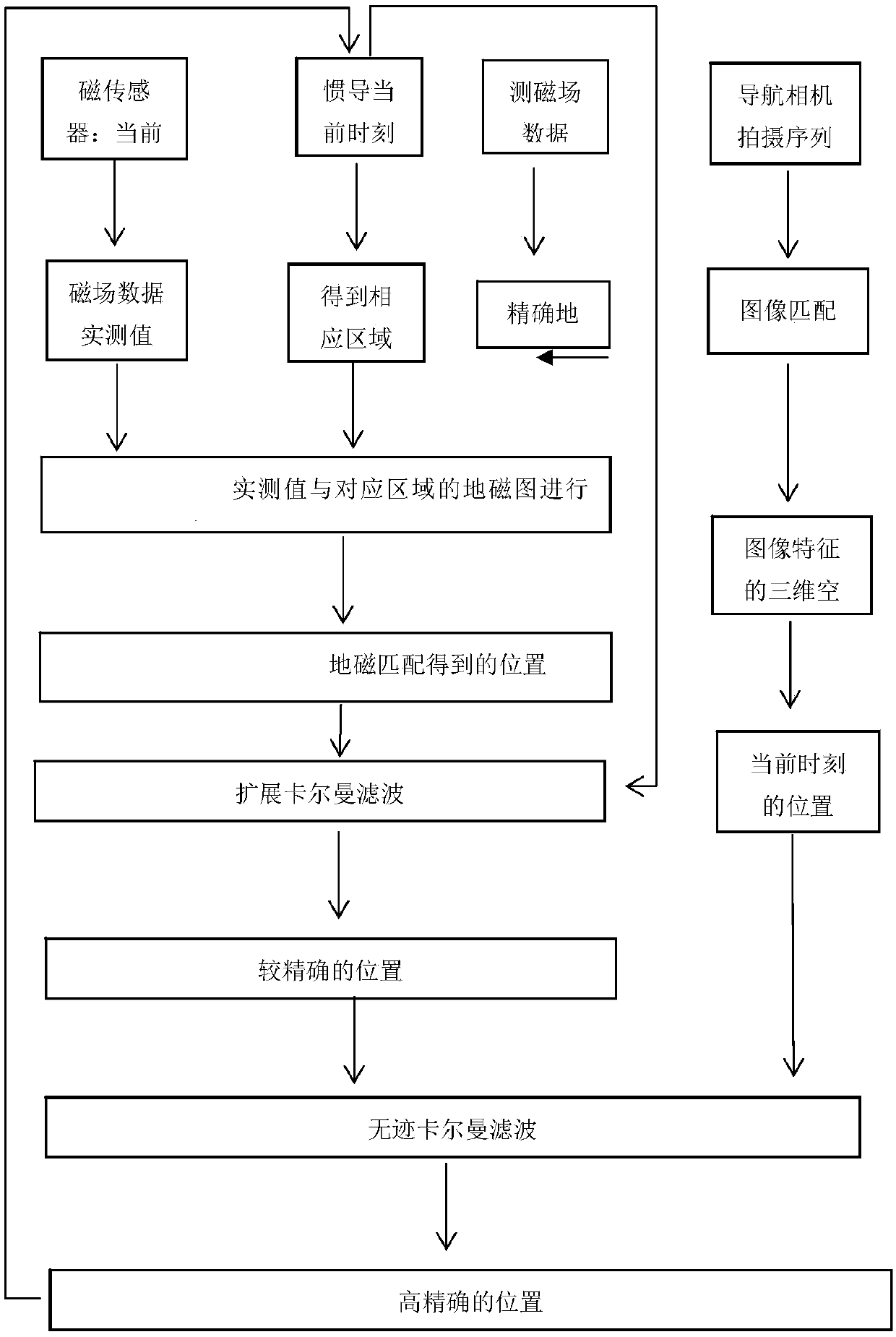
[0114] Such as figure 1 As shown, a complex area inspection robot positioning, navigation and timing method without GPS, the steps are as follows:
[0115] S1, constructing an accurate geomagnetic map;
[0116] Specifically: S1.1, the geomagnetic sensor carried by the inspection robot performs geomagnetic detection in the area to be inspected, and stores the obtained geomagnetic feature quantity;
[0117] S1.2, performing grid division on the area to be inspected to obtain a grid map;
[0118] S1.3, construct a local geomagnetic map based on Kriging interpolation for the obtained geomagnetic feature quantity, and match it with the grid map to obtain an accurate geomagnetic map;
[0119] The construction of the local geomagnetic map is based on the optimal interpolation method of spatial autocovariance. The three main components of the local geomagnetic field, the earth's main magnetic field, the geomagnetic anomaly field, and the disturbance magnetic field, have a one-to-one...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More