

Staged wheel type robot moving path planning method
A wheeled robot and moving path technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of deviation of the traveling path, loss of control of the wheeled robot, failure to reach the preset target state, etc. Achieve the effects of increasing fault tolerance, strong universality, and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
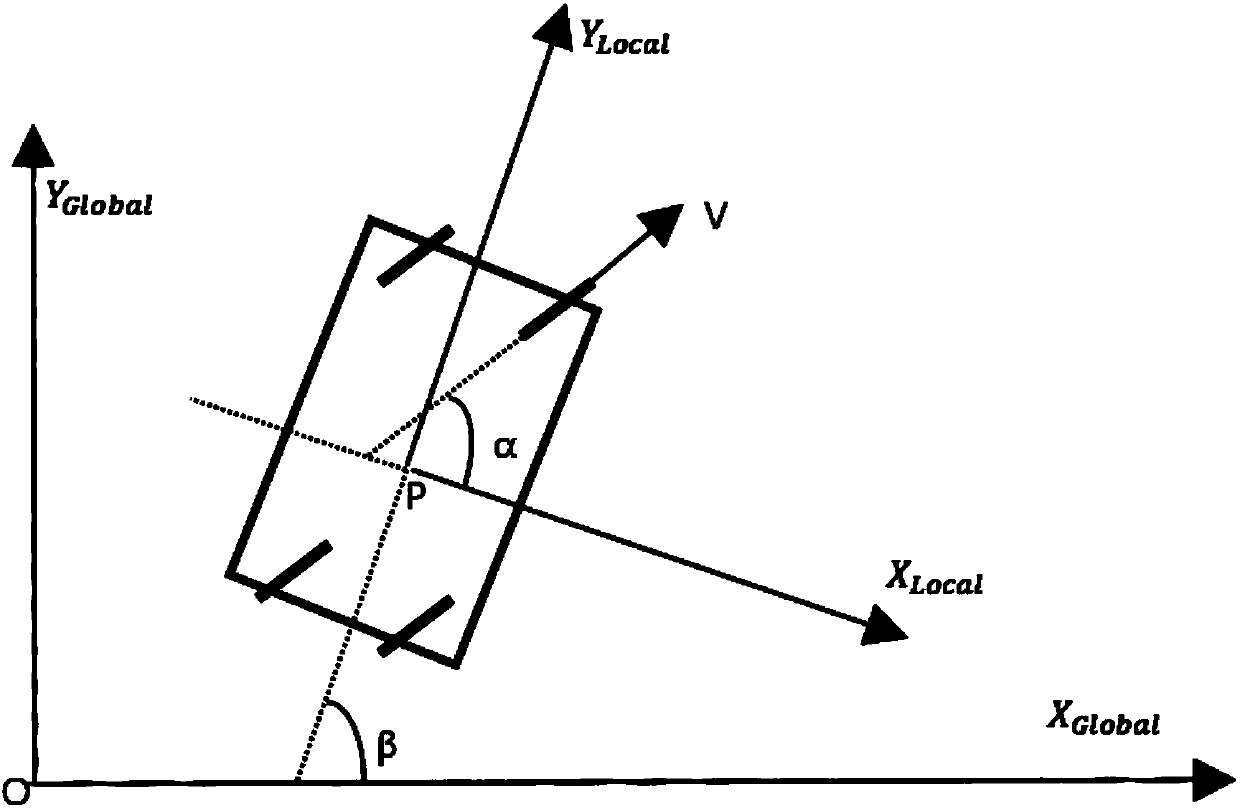
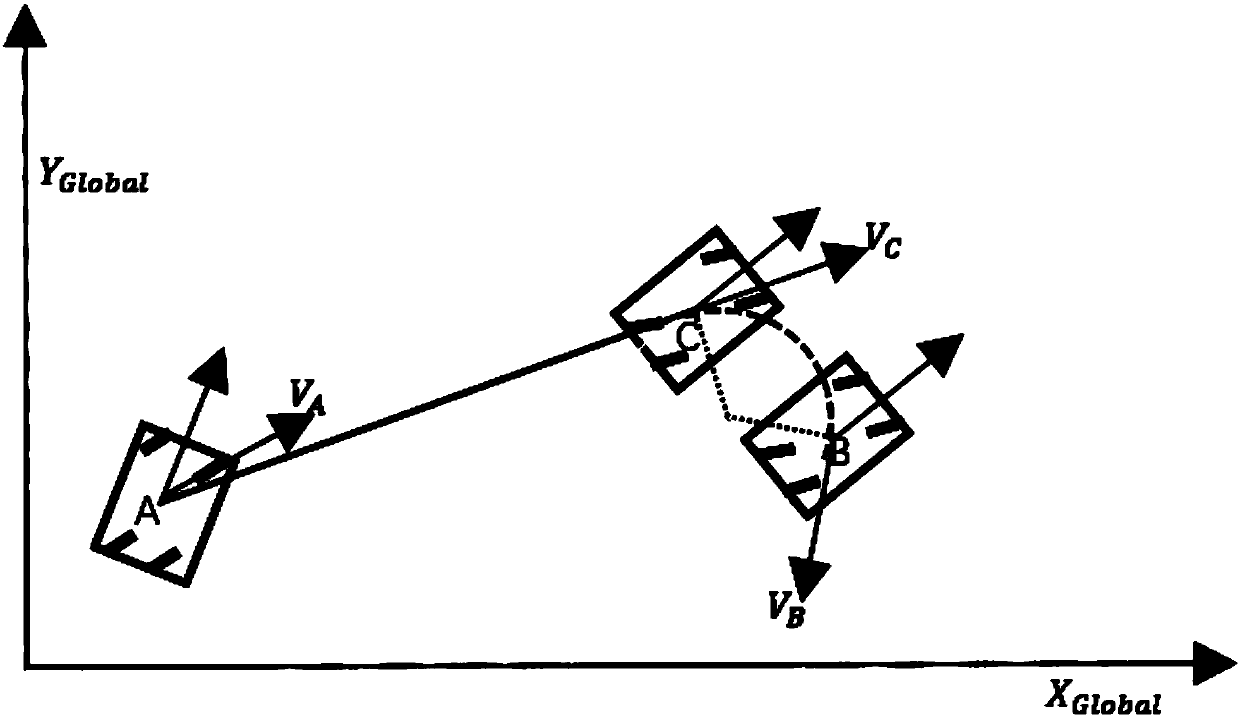
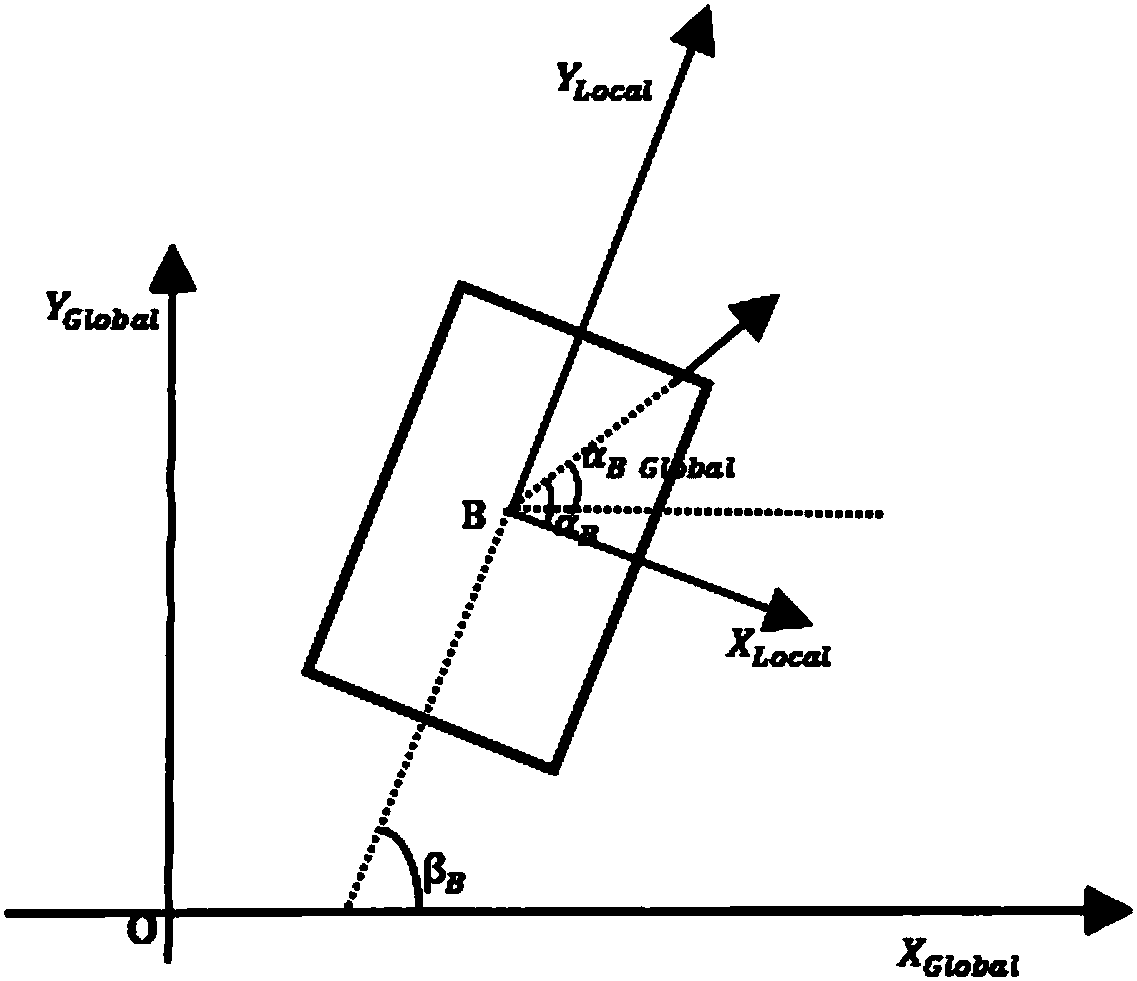
[0035] In the present invention, the position, speed, and posture of the wheeled robot are collectively called the full state of the wheeled robot. The wheeled robot can independently control the speed and direction at the same time. The process of state transition to a known target full state is divided into three stages. In order to solve the problem that the final velocity direction is inconsistent with the initial and final position vector directions during the initial and final full state changes, different from the traditional method that requires a wider space to cut in the velocity direction, this method can be used in a relatively narrow space Any full state change in the environment; on the other hand, this method can change the attitude, speed, and position synchronously, which is different from the currently wide...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More