

A Pneumatic Soft Robot with Ring Longitudinal Muscle Structure
A technology of robots and circular longitudinal muscles, which is applied to manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as difficult control, low running speed, and single motion form, and achieve single motion mode, changing frictional force, and improving The effect of exercise efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0030] 1. Linear motion mode
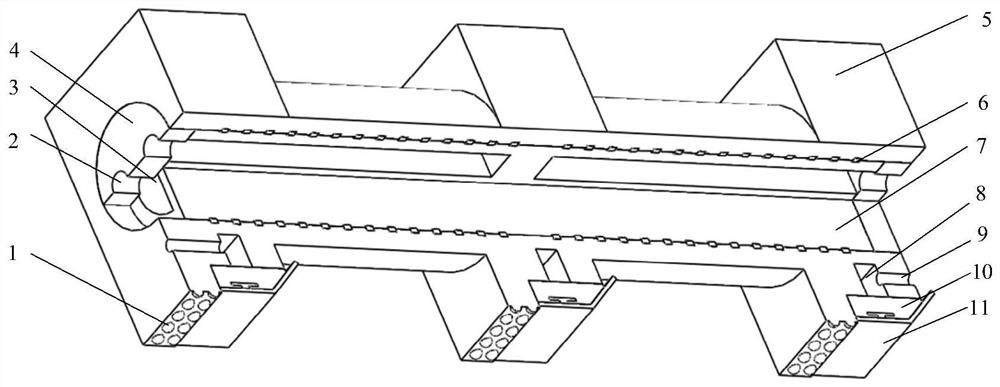
[0031] The left longitudinal muscle air chamber of the robot adopts the first positive pressure source for air supply, the right longitudinal muscle air chamber adopts the second positive pressure source for air supply, and the three circular muscle air chambers 8 adopt the third positive pressure source for air supply. Air is supplied to the annulus muscle air chamber 8 of the head through the third positive pressure source, the silicone sheet 10 of the head is deformed, the sliding sheet 11 is stretched out, and the head is in a lifted state; The left and right longitudinal muscle air cavities 3 supply air, and the air supply pressure is the same. The first body segment is linearly elongated and deformed. At this time, because the head slide protrudes, the friction with the ground is small, and the tail body segment remains motionless. Move the head forward for a certain distance; deflate the head ring muscle air chamber 8, the head silicone sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More