

Redundancy self-locking type manipulator gripper with precisely controlled clamping force
A technology of precise control and clamping force, applied in the field of mechanical claw, it can solve the problems that the mechanical claw cannot precisely control the maximum clamping force, the clamping force cannot be maintained, and the maintaining is not ideal, etc., to achieve a good force locking effect and improve synchronization. , the effect of improving usability and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] Exemplary embodiments, features, and performance aspects of the present invention will be described in detail below with reference to the accompanying drawings. The same reference numbers in the figures indicate functionally identical or similar elements. While various aspects of the embodiments are shown in drawings, the drawings are not necessarily drawn to scale unless specifically indicated.
[0047] The present invention will be further described below in conjunction with the accompanying drawings.
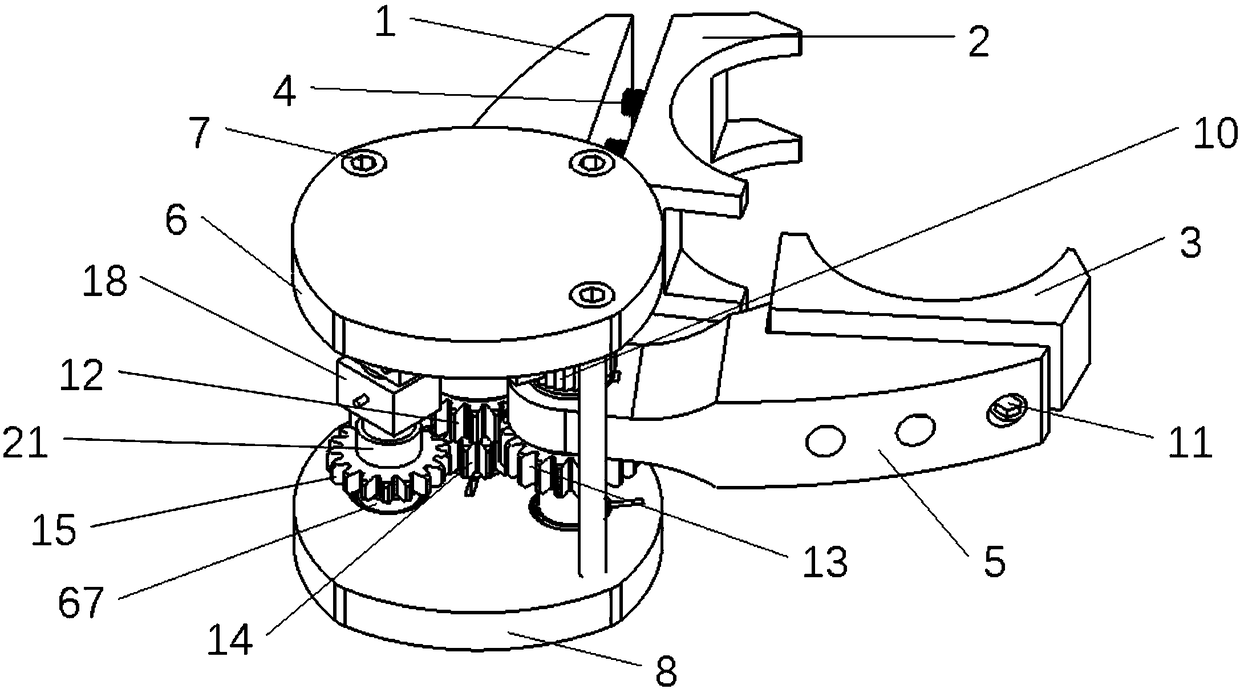
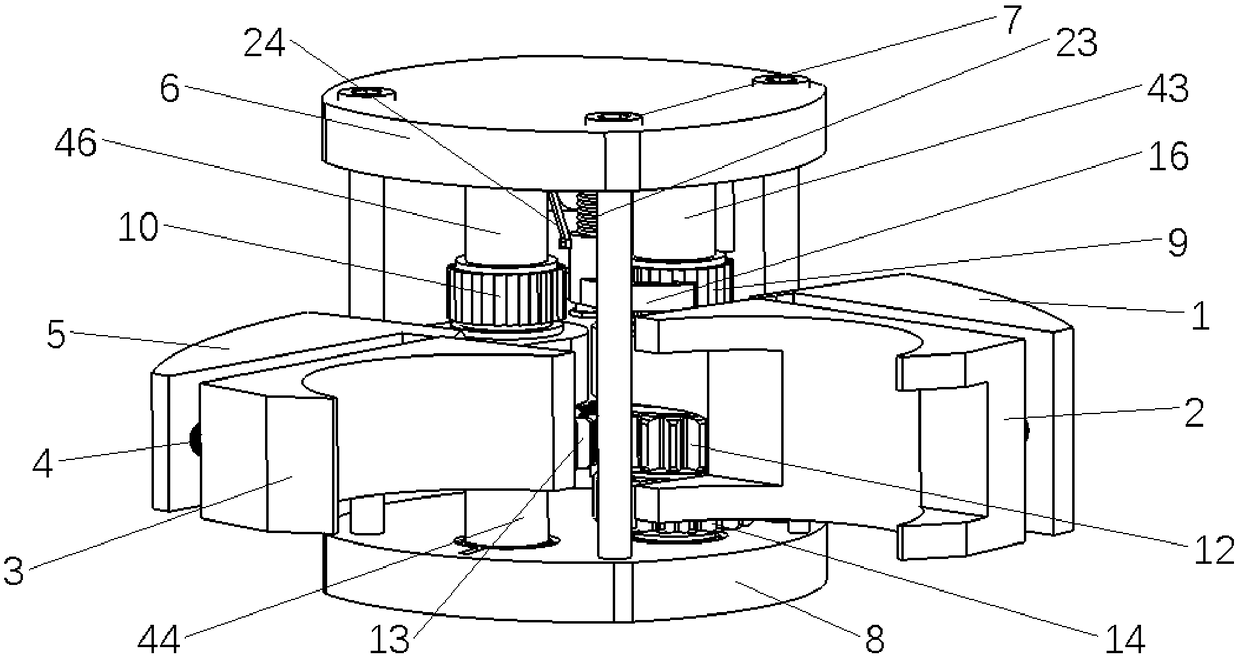
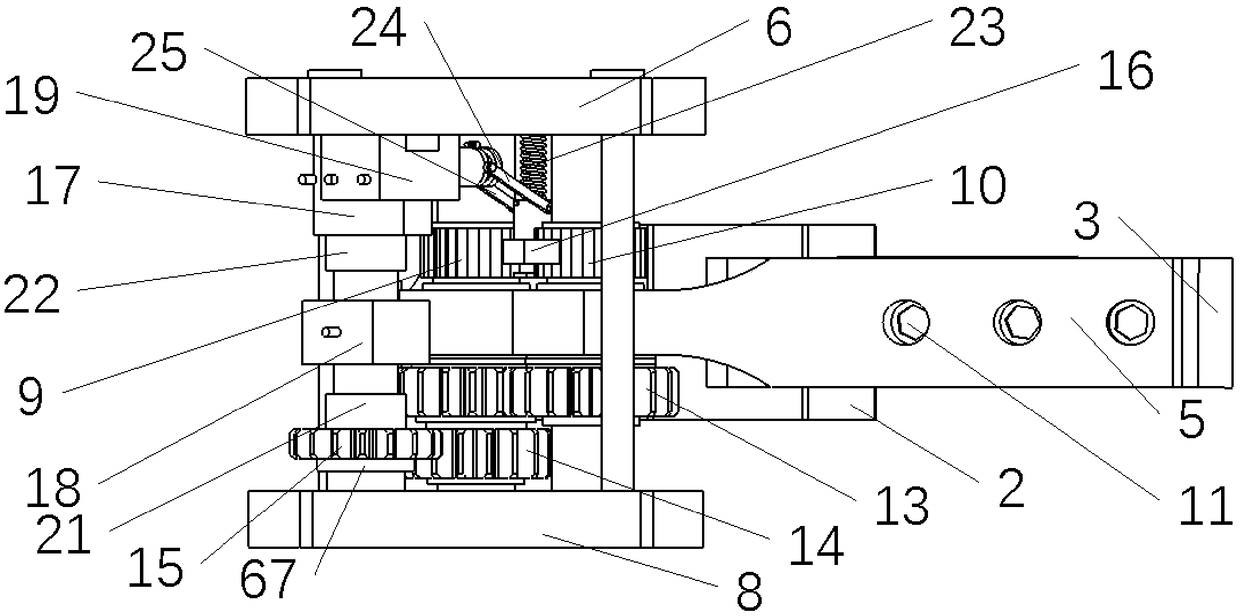
[0048] Such as Figure 1-17 As shown, a redundant self-locking mechanical gripper with precisely controlled clamping force includes a gripper, a transmission mechanism coaxial with the axis of the gripper, a locking mechanism coaxial with the axis of the gripper, and a transmission mechanism Cooperate with and provide the power mechanism for the working driving force of the gripper, the power circuit for delivering the driving force and the reset mechanism; when the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More