

Soft crawling robot
A crawling robot and robot technology, which is applied in motor vehicles, transportation and packaging, etc., can solve the problems of complex motion sequences and crawling speed limitations of soft crawling robots, and achieve the effects of high cost performance, good performance, and simple and effective integration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
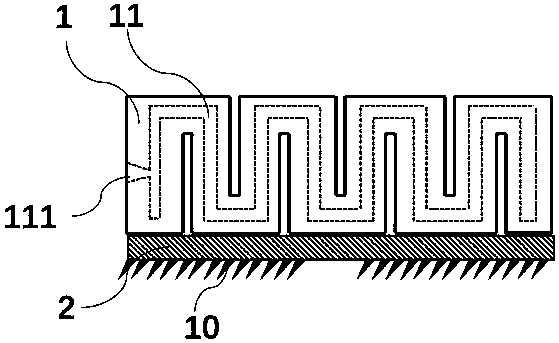
[0023] Such as figure 1 As shown, a soft crawling robot is characterized in that it includes a body 1 and a plurality of wedge-shaped hard friction plates 10 affixed to the body 1. The body 1 is made of a soft material, and the soft material is silica gel or gel or rubber. The overall shape of the body 1 is bow-like, and a bow-like closed air cavity 11 and a vent 111 communicating with an external driving air source are arranged inside.
[0024] During operation, the driving air source inflates or deflates the closed air cavity 11 inside the main body 1 through the air vent 111 . When inflated, the body 1 expands, and under the restriction of the wedge-shaped friction plate 10 , the right end of the body 1 moves to the right relative to the left end of the body 1 . When deflated, the body 1 shrinks, and under the restriction of the wedge-shaped friction plate 10 , the left end of the body 1 moves to the right relative to the right end of the body 1 . When the cycle is infla...
Embodiment 2
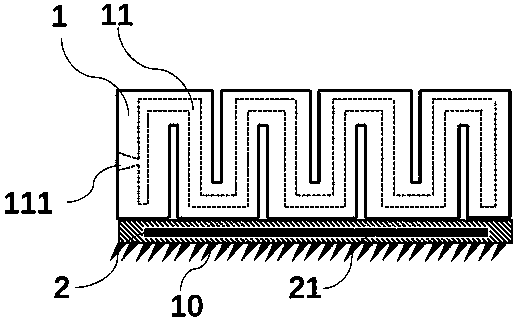
[0026] Such as figure 2 As shown, a soft crawling robot is characterized in that it includes a body 1 and an appendage 2, the body 1 and the appendage 2 are made of soft materials, and the elastic modulus of the material for making the appendage 2 is greater than the elasticity of the material for making the body 1 modulus. The modulus of elasticity of the material for making the appendage 2 is greater than the modulus of elasticity of the material for making the main body 1, and the bending deformation posture and motion process of the entire manipulator can be controlled by the elastic modulus of the material for the appendage 2. The overall shape of the body 1 is bow-like, and a bow-like closed air cavity 11 and a vent 111 communicating with an external driving air source are arranged inside. The bottom surface of the appendage 2 and the main body 1 are fixed together. A plurality of wedge-shaped hard friction plates 10 fixed on the body 1 on the appendage 2 .
[0027] ...
Embodiment 3
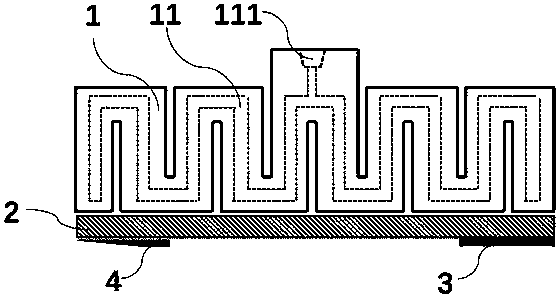
[0030] Such as image 3As shown, a soft crawling robot is characterized in that it includes a main body 1 and an appendage 2. The main body 1 and the appendage 2 are made of the same soft material. When the appendage 2 is made, an inextensible layered layer is set inside it. Substance 21. The overall shape of the body 1 is bow-like, and a bow-like closed air cavity 1 and a vent 111 communicating with an external driving air source are arranged inside. The bottom surface of the appendage 2 and the main body 1 are fixed together. A plurality of wedge-shaped hard friction plates 10 fixed on the body 1 on the appendage 2 . The inextensible layered substance 21 is a gauze net or a fine wire mesh or a paper sheet or a fine fiber net. The body and the appendages of the present invention can be made of soft materials with the same characteristics, and an inextensible layered substance is arranged inside the appendages to ensure that the body of the flexible finger bends under the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More