Robot end-effector with automatic grabbing and posture adjusting functions and adjusting method
An end effector and posture adjustment technology, which is applied in the field of assembly and manufacturing, can solve the problems of large attitude range of end effector, large assembly gap and interference, judgment of deformation of mating surface, etc., achieve high grasping reliability and improve technology The effect of accurate adjustment of level and posture
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
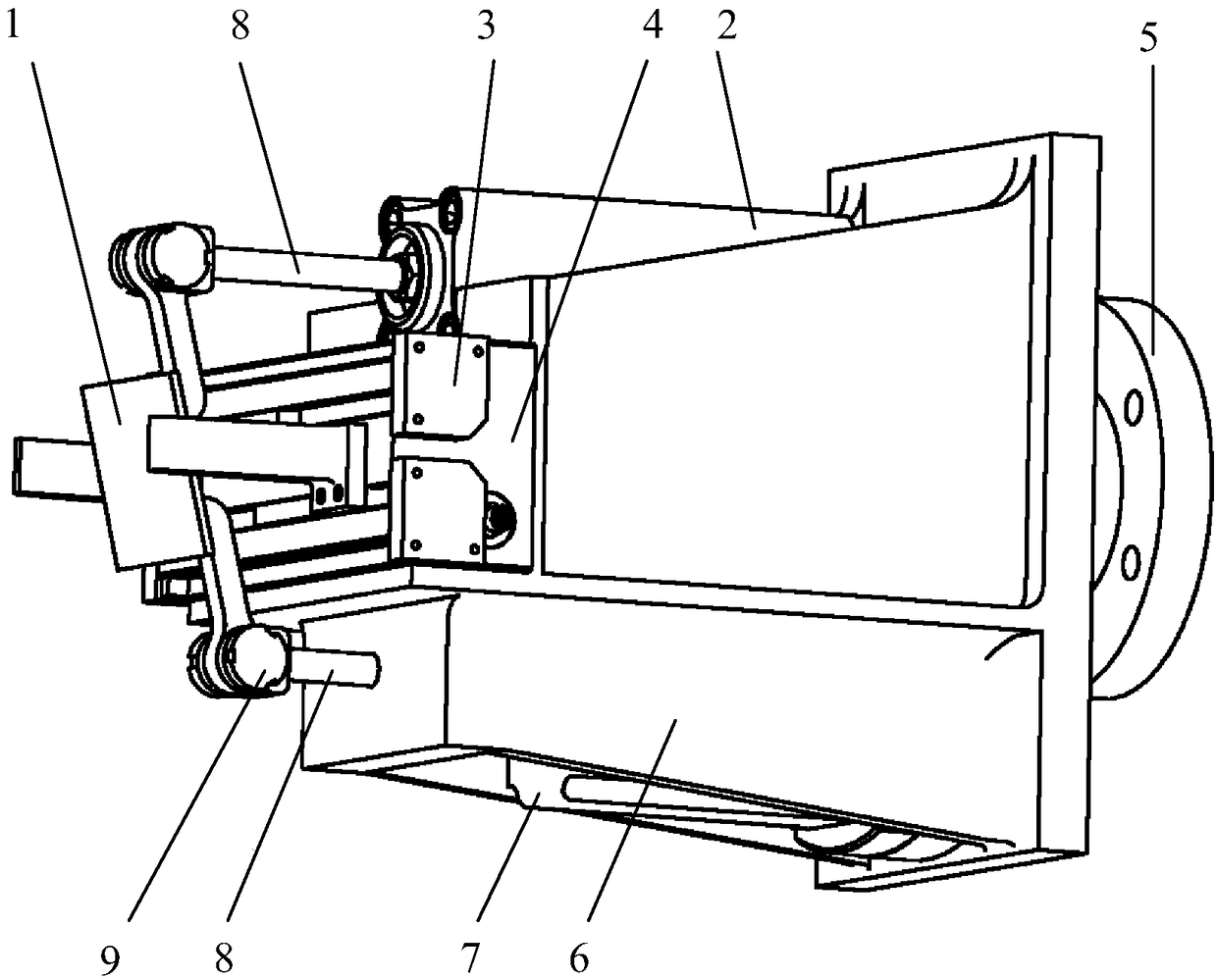
[0026] A robotic end effector for automatic grasping and posture adjustment, such as figure 1 As shown, it includes: positioning adjustment plate 1, lifting electric cylinder 2, laser displacement sensor 3, gripper mechanism 4, connecting flange 5, base 6, driving motor 7, connecting rod assembly (fixed connecting rod 8, hinge 9) .
[0027] The connecting flange connects the entire end effector to the robot;
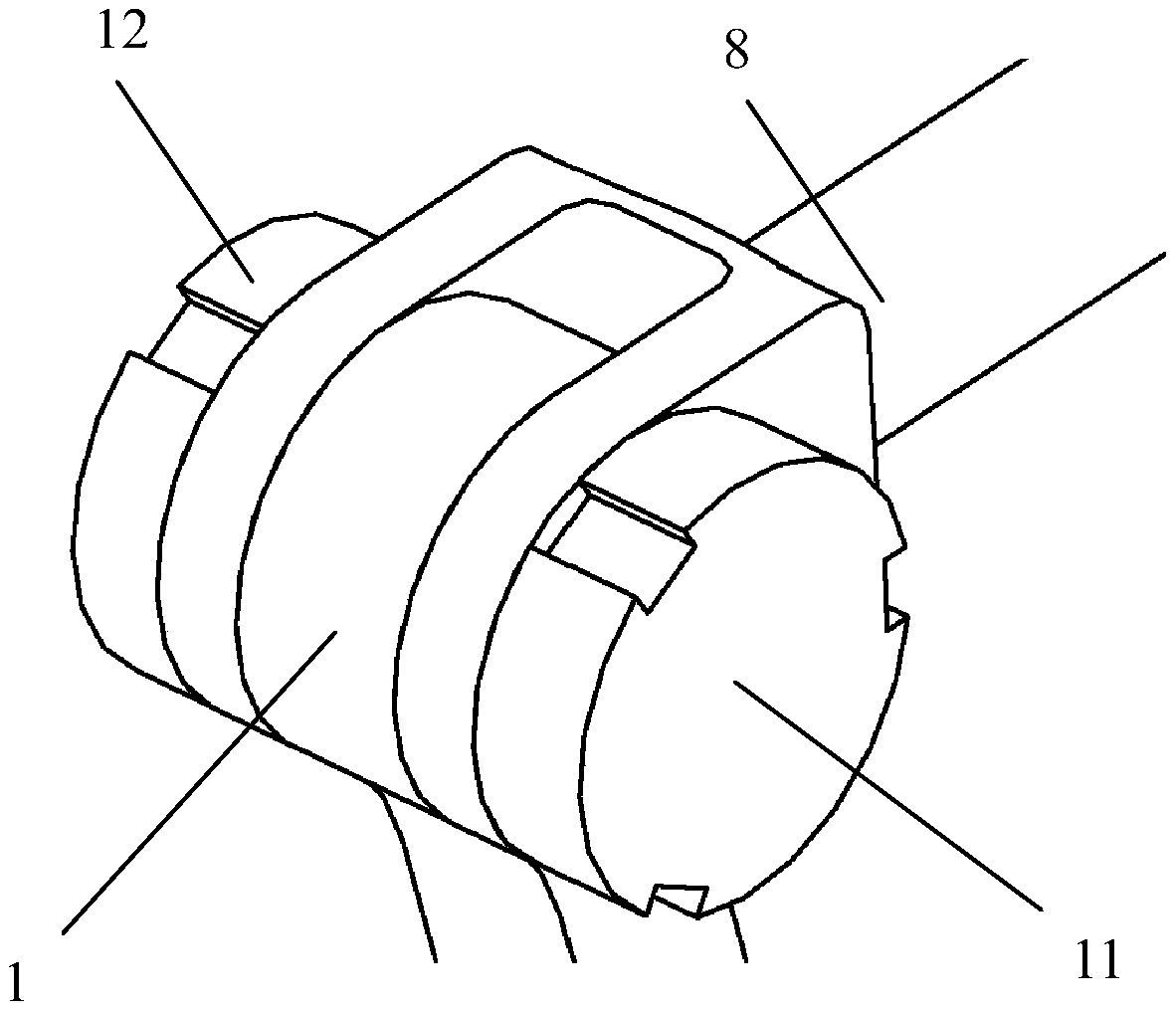
[0028] The positioning adjustment plate 1 can realize the positioning of the object 10 to be grasped through the plane on the positioning plate, so as to ensure that the surface of the part and the positioning surface fit together. The round hole structure on the legs on both sides cooperates with the connecting rod assembly (fixed connecting rod 8, hinge 9), which can realize the rotary motion around the center of the hinge 9, and realize the adjustment of the angle posture of the object 10 to be grasped.
[0029] Such as figure 1 As shown, the lifting electric cylin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com