

Three-axis self-calibration method for vehicle-mounted acceleration sensor
An acceleration sensor and acceleration sensor technology, applied in the testing/calibration of speed/acceleration/shock measurement equipment, speed/acceleration/shock measurement, instruments, etc., can solve the problem of not being able to provide real-time three-axis, and shorten the calibration time , quick results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
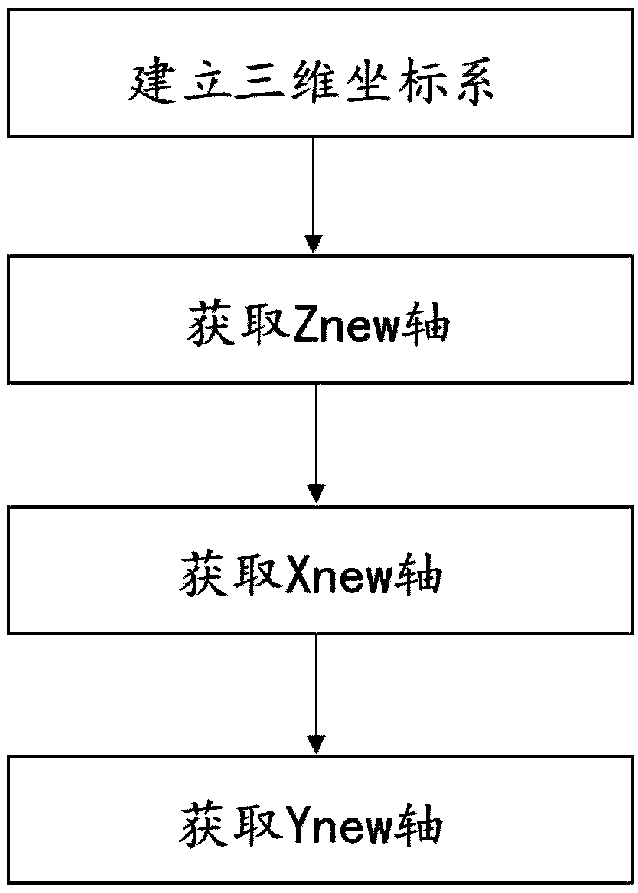
[0036] refer to figure 1 , the present embodiment provides a three-axis self-calibration method for a vehicle-mounted acceleration sensor, including establishing a three-dimensional coordinate system, obtaining Z new Axis, Get X new Axis and get Y new axis.
[0037] Among them, establishing a three-dimensional coordinate system includes:
[0038] Establish the three-dimensional coordinate system O-XYZ based on the acceleration sensor and the three-dimensional coordinate system O-X based on the driving direction of the car new Y new Z new , let the three-dimensional coordinate system O-XYZ and the three-dimensional coordinate system 0-X new Y new Z new The transformation equations for are:
[0039] x new =a1*X+b1*Y+c1*Z;
[0040] Y new =a2*X+b2*Y+c2*Z;
[0041] Z new =a3*X+b3*Y+c3*Z.
[0042] Among them, get Z new Axes include:
[0043] At the moment of vehicle ignition, the acceleration sensor is only affected by gravity G, and the opposite direction of gravit...
no. 2 example
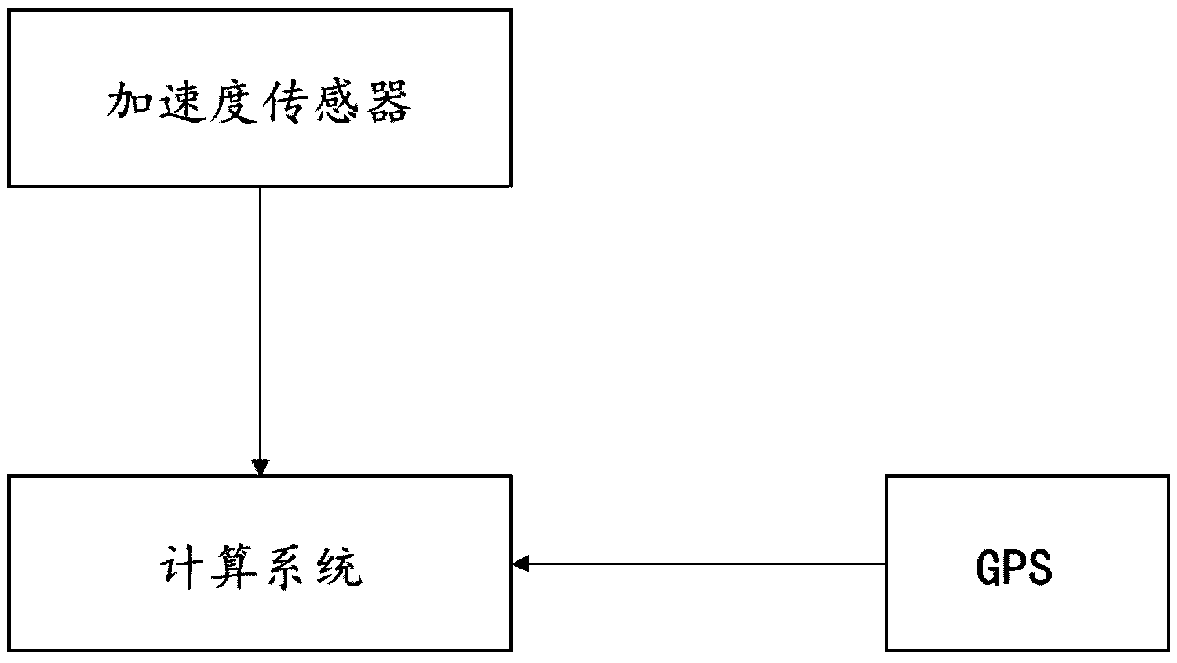
[0065] refer to figure 2 , this embodiment provides a three-axis self-calibration system for a vehicle-mounted acceleration sensor, including an acceleration sensor, a GPS, and a computing system.
[0066] The three-dimensional coordinate system based on the acceleration sensor is O-XYZ, and the three-dimensional coordinate system based on the driving direction of the car is O-X new Y new Z new , let the three-dimensional coordinate system O-XYZ and the three-dimensional coordinate system O-X new Y new Z new The transformation equations for are:
[0067] x new =a1*X+b1*Y+c1*Z;
[0068] Y new =a2*X+b2*Y+c2*Z;
[0069] Z new =a3*X+b3*Y+c3*Z.
[0070] Among them, GPS is used to collect vehicle speed to determine whether the vehicle is in an accelerated state.
[0071] When the GPS senses that the vehicle is accelerating, it triggers the computing system to calculate X new axis:
[0072] The on-board acceleration sensor is subjected to a resultant force towards X n...
no. 3 example
[0087] The present invention also provides a method for monitoring driving habits. First, the method described in the first embodiment is used to calibrate the vehicle-mounted acceleration sensor.
[0088] Then within the preset time interval Δt, calculate the force variation Δx of the vehicle in the forward direction. If Δx is greater than the preset threshold, it will be recorded as a bad driving habit; otherwise, it will be a normal driving habit.
[0089] The technical solution can accurately collect driving habits.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More