

Target identification and capture positioning method based on deep learning
A deep learning and target recognition technology, applied in the field of machine vision, can solve problems such as poor generalization ability and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0056] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
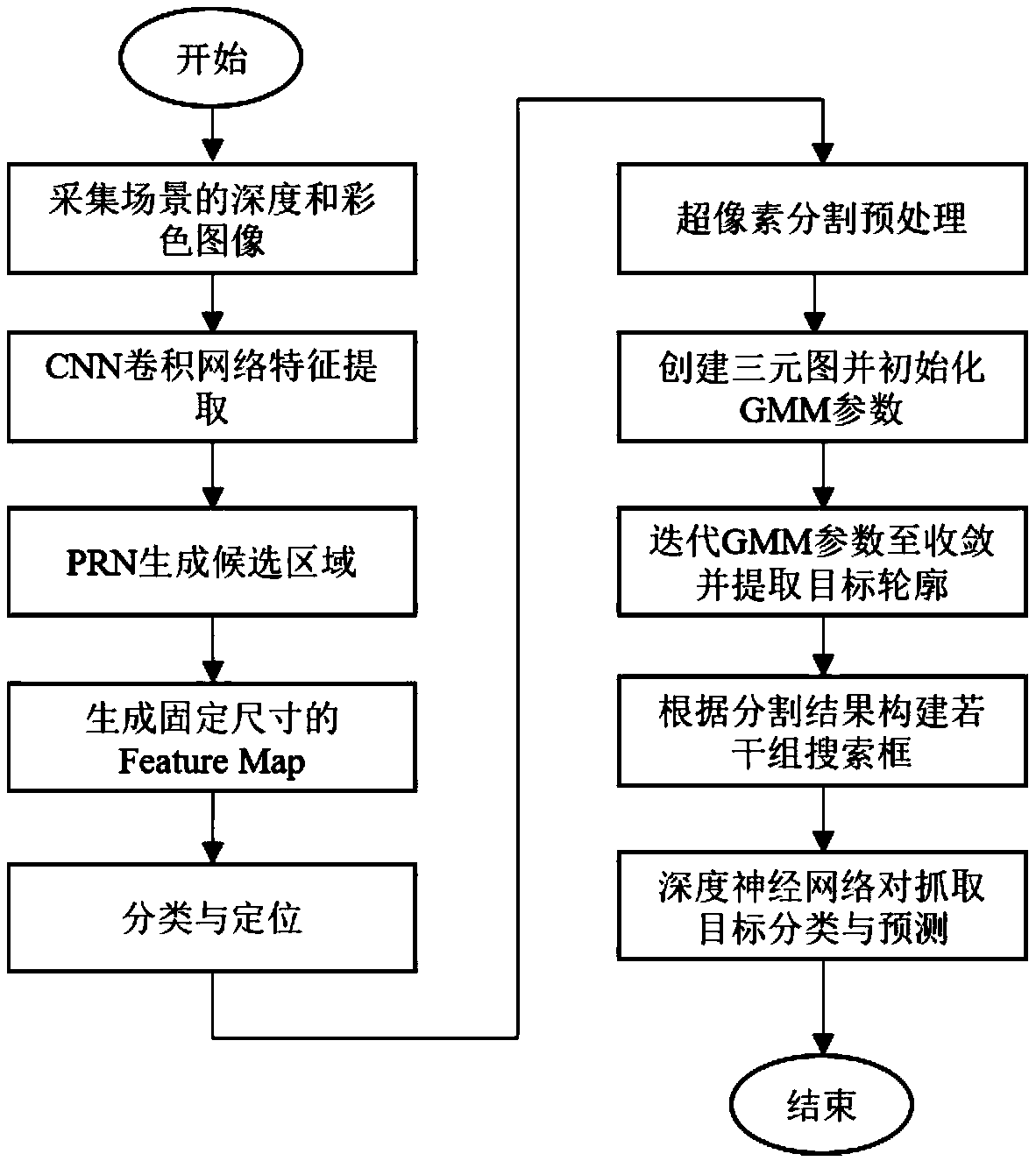
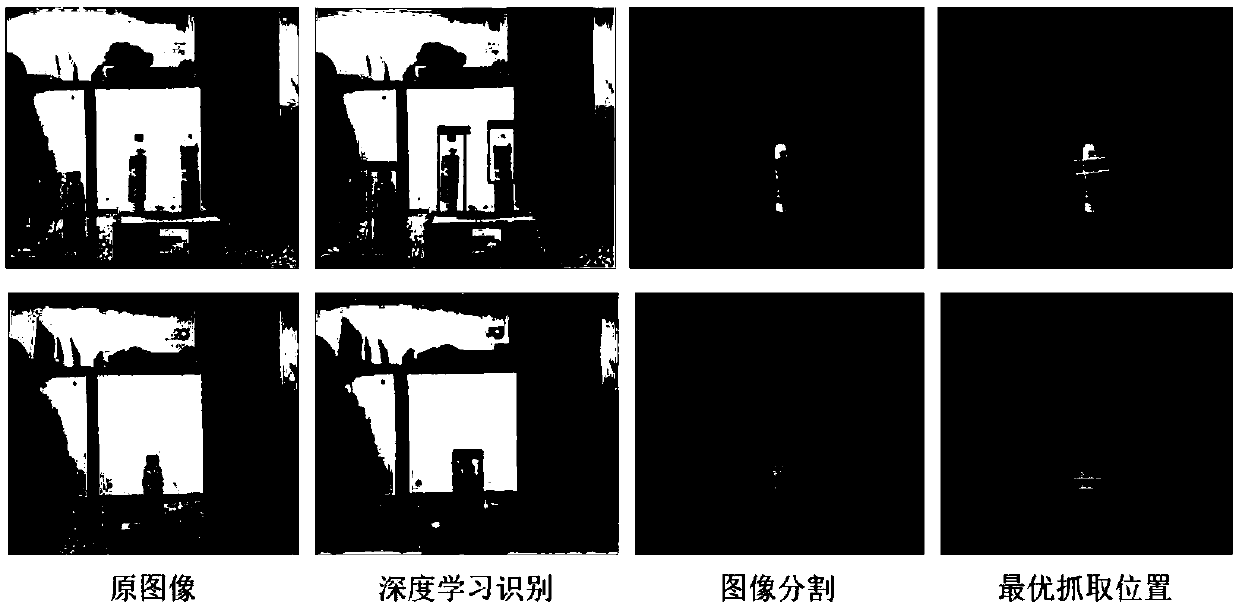
[0057] In order to solve the problems existing in the above-mentioned traditional vision algorithms, a target recognition and grasping positioning method based on deep learning is proposed. First, use the Kinect camera to collect the depth and color images of the scene, use the Faster RCNN deep learning algorithm to identify the scene target, select the captured target area according to the recognized category, and use it as the input of the GrabCut image segmentation algorithm to extract the outline of the target, and then obtain The specific position of the target, and then use the position information as the input of the cascade neural network to detect the optimal grasping position, and finally obtain the grasping position and posture of the manipulator. The overall flow of the method involved is attached figure 1 As shown, the specific im...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More