

Parallel mechanism achieving three-dimensional translation, one-dimensional rotation and four degrees of freedom
A degree of freedom, parallel technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as complex kinematics, dynamic solution problems, complex parallel mechanisms, etc., to achieve high-speed and high-acceleration dynamic response characteristics, space Fast, quality-reducing effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the embodiments.
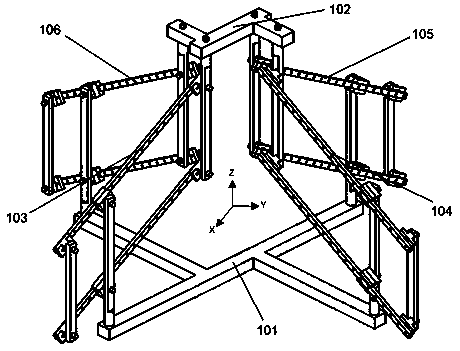
[0012] Such as figure 1 As shown, a three-level one-rotation four-degree-of-freedom parallel mechanism consists of a static platform 101, a dynamic platform 102, and a first active branch chain 103, a second active branch chain 104, and a third active branch chain 105 connecting the two platforms. and the fourth active branch chain 106, and the four active branch chains are symmetrically distributed in a 90-degree space between two pairs.
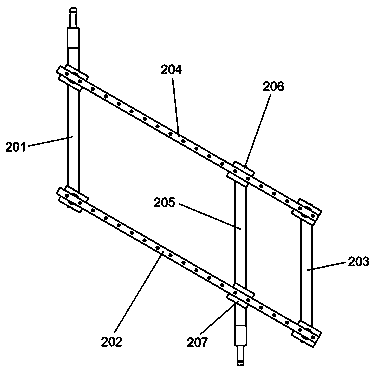
[0013] Such as figure 2 As shown, the structures of the first active branch chain 103, the second active branch chain 104, the third active branch chain 105 and the fourth active branch chain 106 are the same, and each active branch chain is a parallelogram connecting rod sliding block mechanism, which is composed of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More