

Path planning method based on simulated plant growth guided RRT algorithm
A technology for path planning and plant growth, which is applied in the direction of navigation calculation tools, etc., can solve the problems of low operation efficiency of RRT algorithm, achieve the effects of improving execution efficiency and stability, improving executable performance, and improving tracking effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with accompanying drawing:
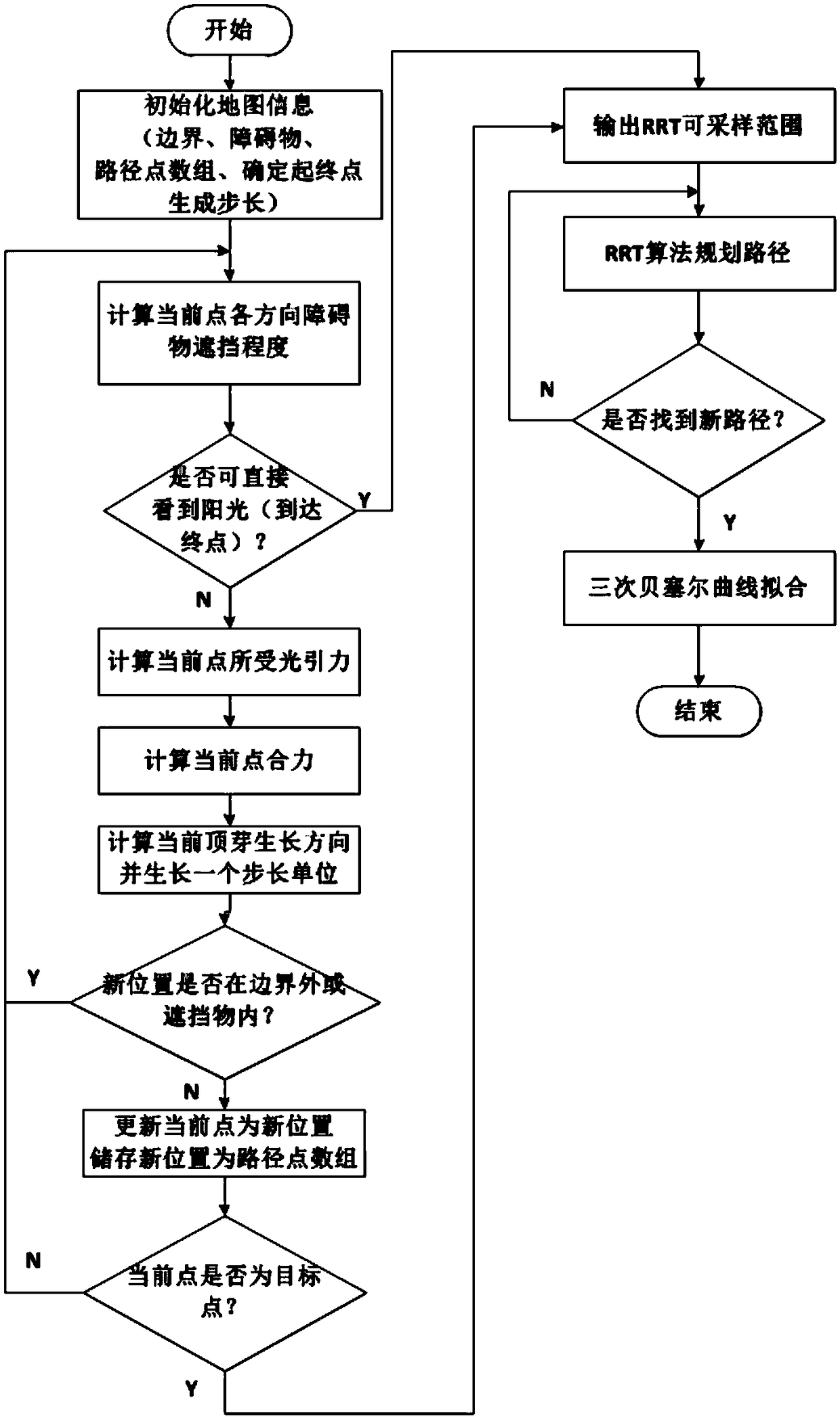
[0043] Such as Figure 1~3 As shown, a path planning method based on the simulated plant growth guided RRT algorithm includes the following steps:
[0044] Step 1: Initialize the map information: import the map and rasterize the map, import the boundary and obstruction (roadblock) information and binarize the map information, initialize the coordinates of the starting point and target point, the array of path points, and set the starting point as the current point (x, y), the target point is the light source point (Goal x, Goal y ), the growth step;
[0045] Step 2: Calculate the influence of growth and obstruction of roadblocks in all directions at the current point;
[0046] Step 3: Determine whether the light source point can be seen directly, if yes, output the path point array, and execute step 11;
[0047] Step 4: Calculate the gravitational force of light on the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More