

Robot joint arm and robot
A robot joint and encoder technology, applied in the field of robots, can solve the problems of large axial size of the motor and increase in the axial size of the robot joint arm, and achieve the effect of improving the functional density and reducing the axial size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0046] Words such as "first" and "second" mentioned herein are only used to describe two or more structures or components with the same or similar structures, and do not represent any special limitation on the order.
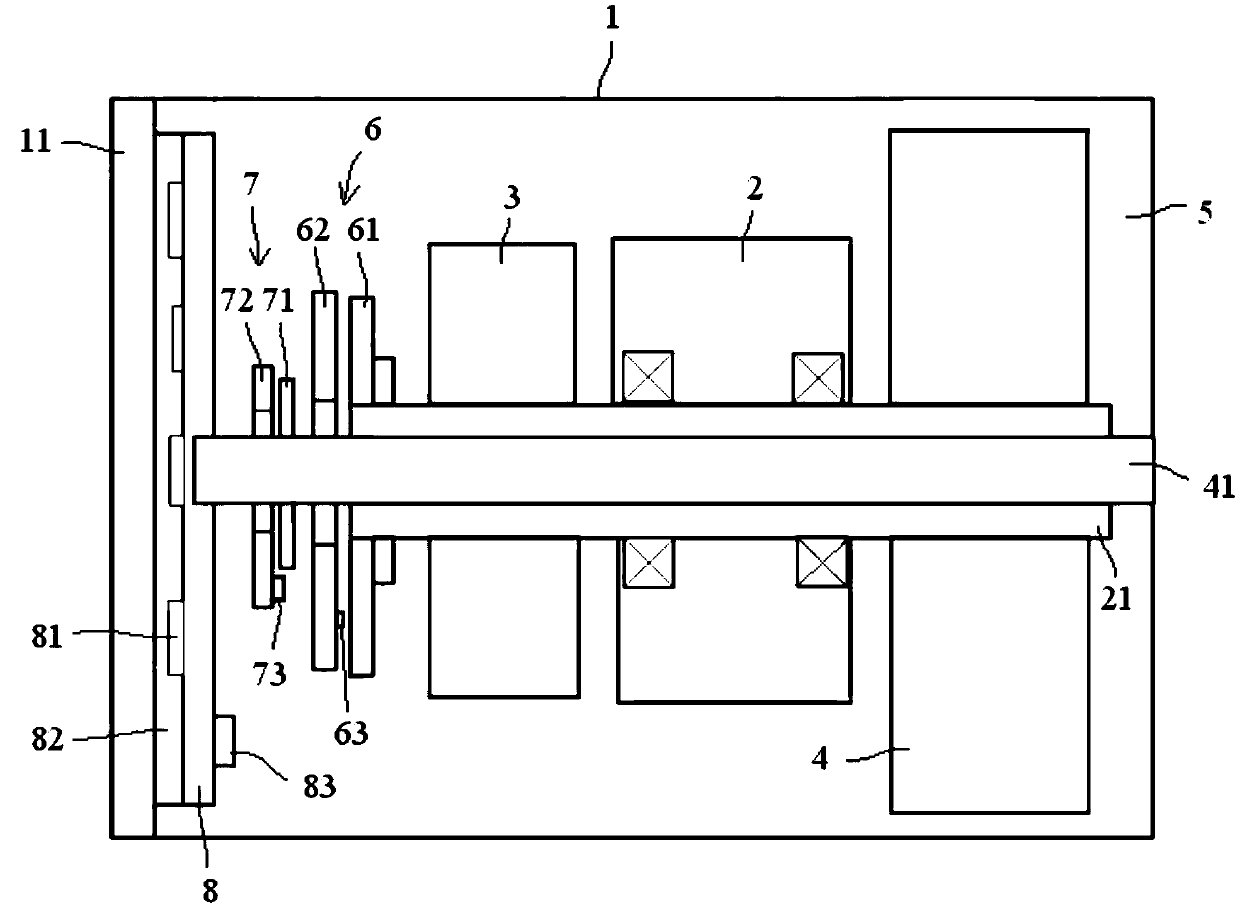
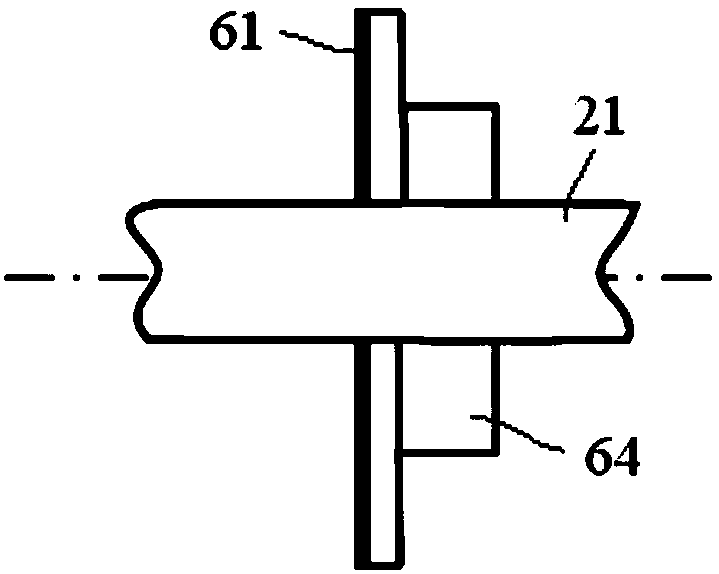
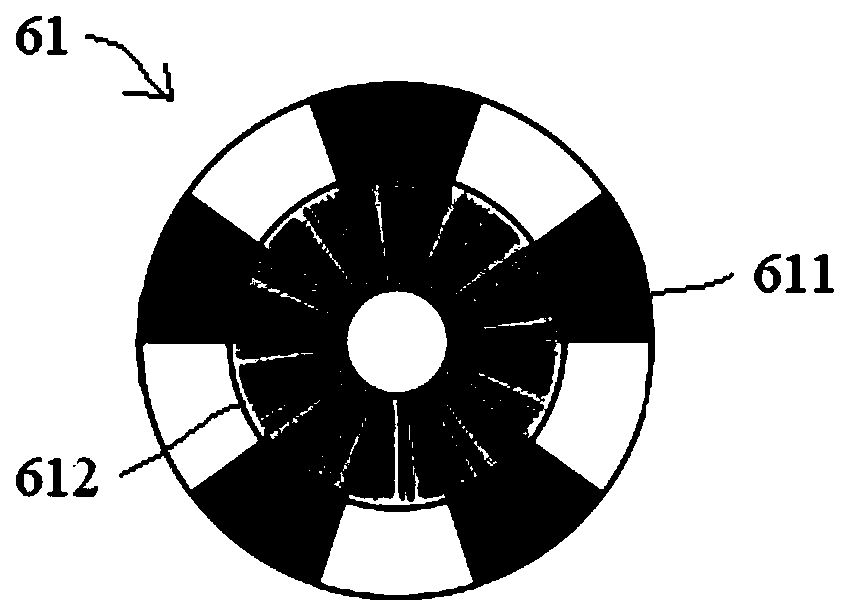
[0047] Please refer to Figure 1-6 , figure 1 It is a structural schematic diagram of a specific embodiment of the robot articulated arm provided by the present invention, figure 2 is a schematic structural diagram of the first encoder, image 3 for figure 2 left view of Figure 4 It is the connection structure diagram of the second encoder board, the second mounting seat and the flange shaft, Figure 5 It is the connection structure diagram of the driver board, the first encoder board and the second...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More