Unmanned aerial vehicle route planning method based on operator cognitive loads
A cognitive load and route planning technology, applied in navigation computing tools, three-dimensional position/course control, vehicle position/route/altitude control, etc., can solve the problem of unbalanced operator workload and UAV autonomy, etc. To achieve the effect of ensuring the completion rate of tasks, improving the completion of tasks, and completing tasks efficiently
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
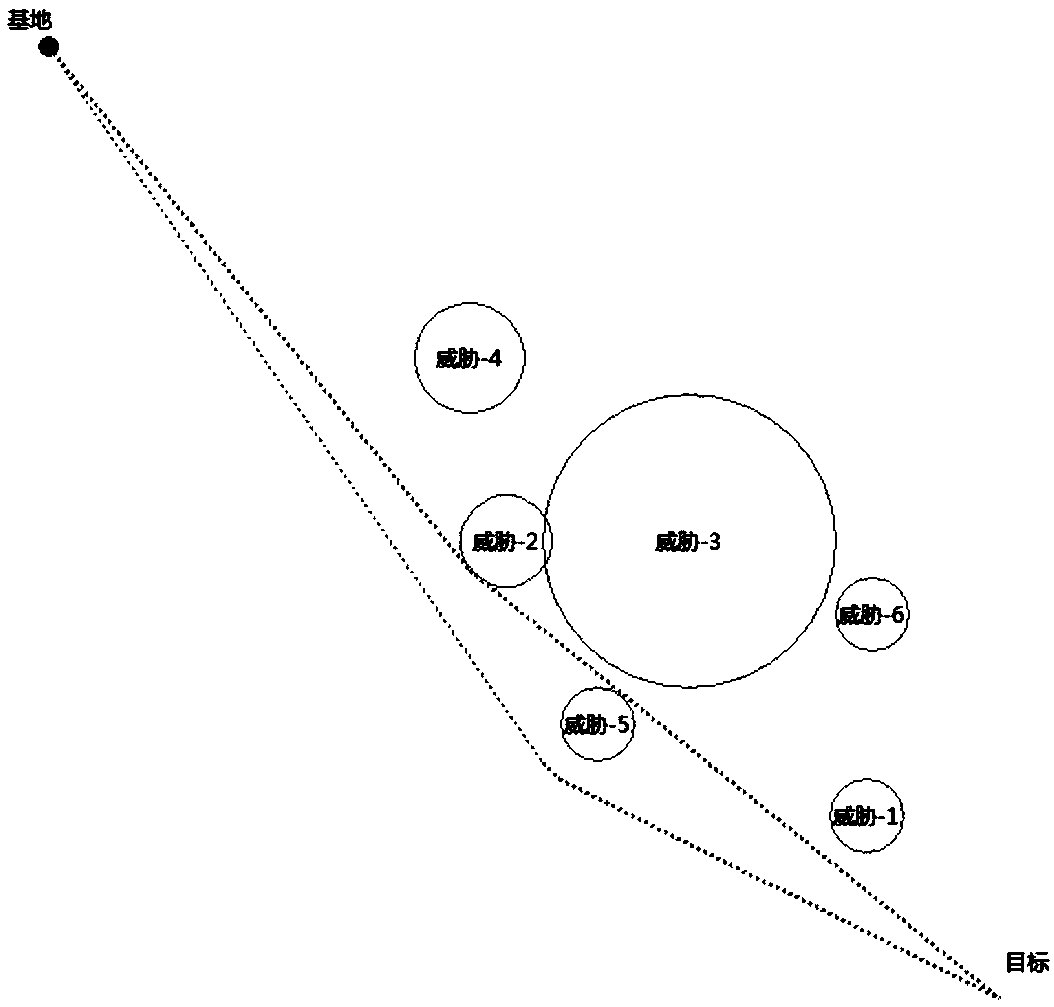
[0123] Example 1: When UAVs fly in formation, route planning is required when performing missions.
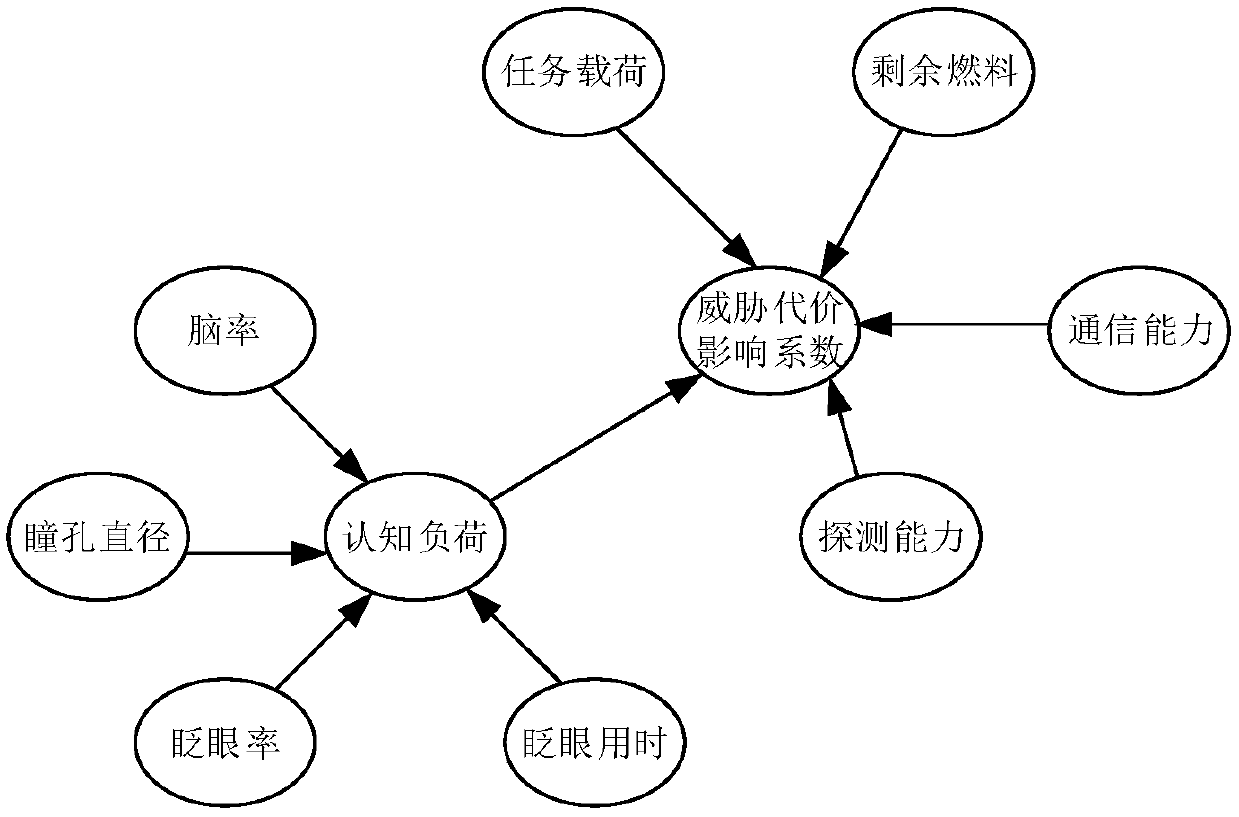
[0124] Step1: Calculate operator cognitive load
[0125] The UAV obtains the current physiological state of the operator to calculate the cognitive load of the operator. The acquired physiological data and processing of the operator are as follows:
[0126] table 5
[0127]
[0128] The operator's cognitive load calculated by formula (1-1) is 0.72.
[0129] Step2: Calculating the threat cost influence parameter P rc
[0130] Table 8 shows the UAV parameters and corresponding data that need to be obtained.
[0131] Table 6
[0132]
[0133]
[0134] According to formula (1-2), the threat cost influence parameter P is calculated rc is 0.19.
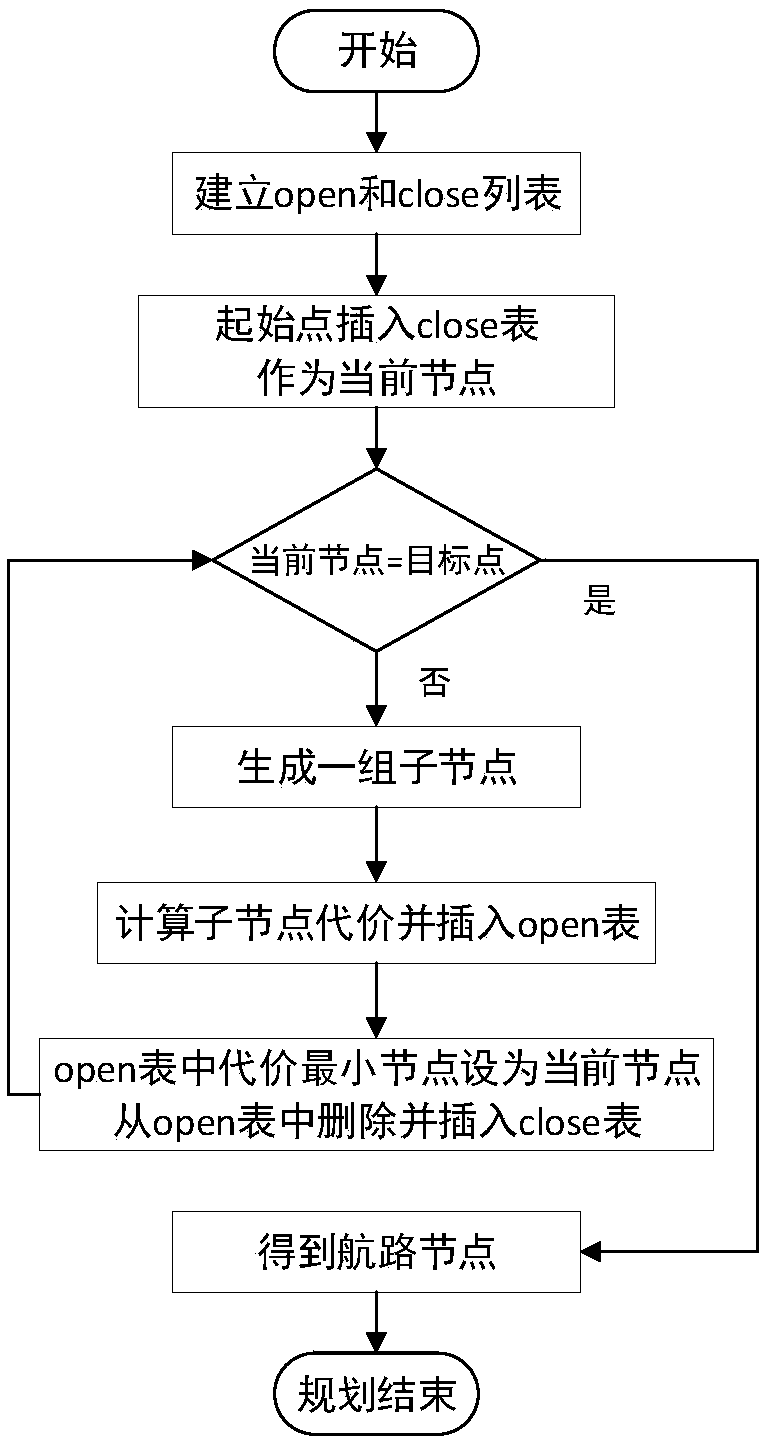
[0135] Step3: Use the improved A* algorithm for route planning
[0136] The influence parameter of the route cost obtained in step2 is 0.19, and the avoidance distance is calculated: D=16.2, and the route is planned by using...
example 2
[0140] Example 2: UAV formation flight, after completing the mission, path planning when returning home.
[0141] Step1: Calculate operator cognitive load
[0142] The UAV obtains the current physiological state of the operator to evaluate the cognitive load of the operator. The obtained physiological parameters of the operator are as follows:
[0143] Table 8
[0144]
[0145] According to formula (1-1), the cognitive load of the current operator is calculated to be 0.14.
[0146] Step2: Calculating the threat cost influence parameter P rc
[0147] Table 11 shows the parameters and corresponding data that need to be obtained
[0148] Table 9
[0149]
[0150] According to formula (1-2), calculate the threat cost influence parameter P rc It is 0.89, indicating that both the operator and the UAV are in good condition.
[0151] Step3: Use the improved A* algorithm for route planning
[0152] According to the influence parameter of the threat cost obtained in Step2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com