Method for evaluating navigation positioning accuracy
A technology of navigation positioning and absolute positioning accuracy, which is applied in the field of navigation positioning, can solve problems such as inapplicability, and achieve the effects of strong practicability, simplified steps, and easy realization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0043] A method for evaluating navigation positioning accuracy, specifically comprising the following steps:
[0044] Step 1: Install the integrated navigation device using single-axis gyroscope, inclinometer and odometer (patent application "Integrated navigation device and method using single-axis gyroscope, inclinometer and odometer", application number is 201610564309.2) in On the robot carrier, mark the reference point; set up the RTK reference station, install the RTK rover on the robot carrier, wherein: ensure that the reference point of the RTK rover coincides with the reference point of the robot carrier; the sampling rate of the RTK rover is 0.5 Seconds - 5 seconds (0.5 seconds is taken here);
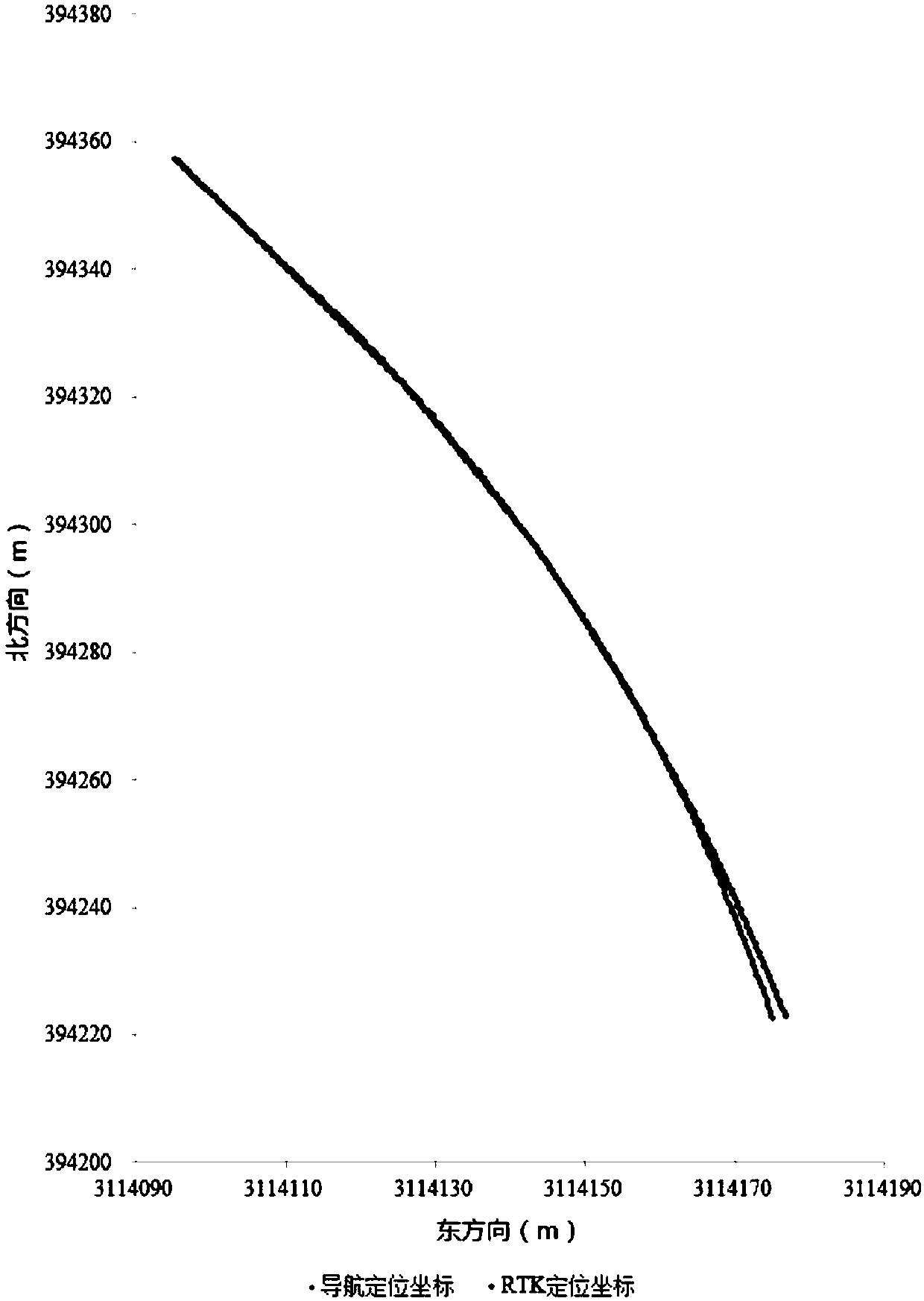
[0045] Second step: start the robot carrier, record the position coordinates calculated by the integrated navigation device and the position coordinates output by the RTK mobile station while walking (see the track diagram for details figure 1 ); the integrated navigation de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More