

Plant protection unmanned aerial vehicle route planning method based on arbitrary polygon barrier-free area
A technology for plant protection drones and track planning, applied in the field of plant protection drone track planning, which can solve problems such as low operation efficiency, large drone consumption, and pesticide waste.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below in combination with specific embodiments.
[0027] The present invention is based on the plant protection UAV track planning method of any polygon barrier-free area, according to the following steps:
[0028] Step 1: Build the coordinate system of the work environment; the user draws the work area on the map, obtains the coordinates of each vertex in the work area, obtains the minimum longitude and minimum latitude of the vertex, and constructs a two-dimensional coordinate system with the latitude and longitude less than the minimum longitude and latitude of the vertex as the origin ;
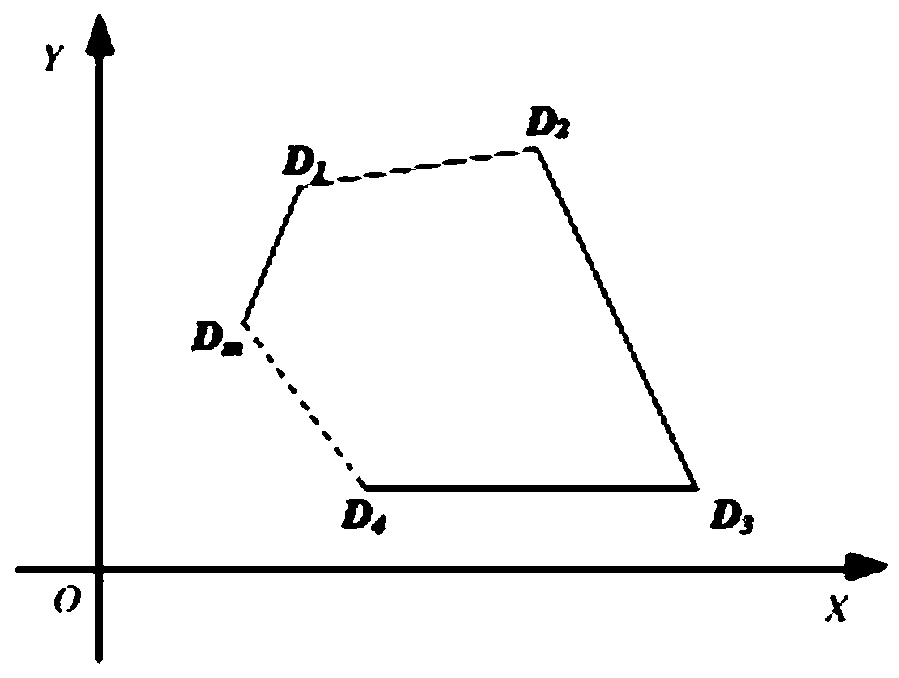
[0029] Step 2: Determine whether the working area is a concave polygon. Specifically, it can be judged by whether there is a concave point, and the judgment method is as follows:
[0030] Such as figure 1 , assuming that the vertices of the region are numbered D in a clockwise order 1 D. 2 D. 3 D. 4 …D n , to determine wheth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More