

Wave-glider multi-body-heading-fused model-free adaptive course control method
A model-free self-adaptive and heading control technology, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as inability to maintain synchronization, inconsistent movement of wave glider, and inability to directly apply wave glider heading control, etc. problem, to achieve a strong adaptive effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] The present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
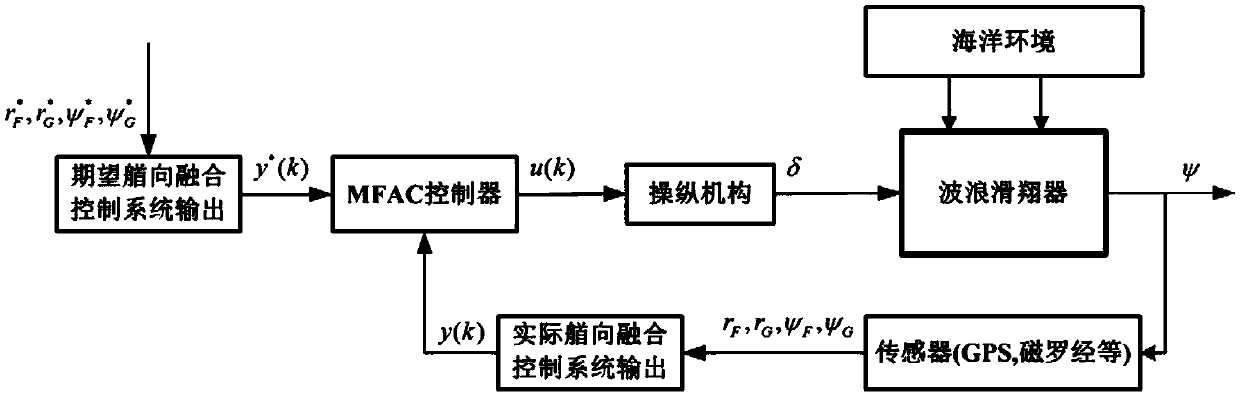
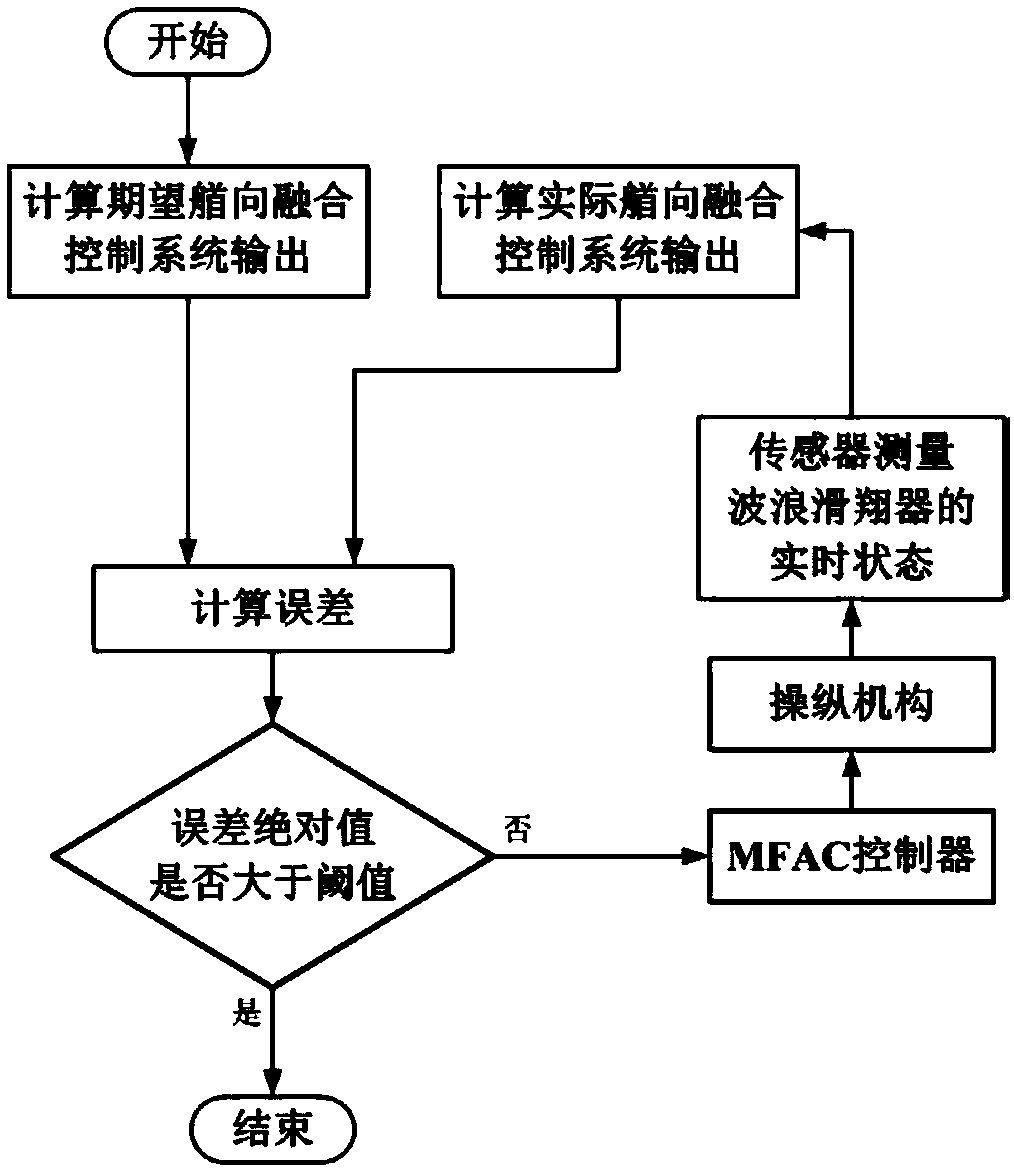
[0020] Combine figure 1 Describe the structure of the wave glider heading control system. Known wave glider expected course ψ * , According to the principle of the present invention, select the desired angular velocity of the floating body Desired submerged body turning angle speed Expected float heading And expected heading According to the above values, calculate the expected heading fusion control system output y * (k). At the same time, the sensors carried by the wave glider measure in real time, which are the heading angular velocity r of the floating body. F , The turning angular velocity of the submerged body r G , The heading angle of the floating body ψ F And submerged body heading angle ψ G , Calculate the actual heading fusion control system output y(k). MFAC controller according to the expected output y(k) and actual output y at each ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More