

Coupling forward feedback control method aiming at robot
A technology of feedforward control and feedforward controller, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems such as restricting control quality, and achieve the effect of simple algorithm and easy implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0016] In order to make the technical solution of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings. It should be understood that the specific examples described here are only used to explain the present invention, but are not limited to this example.
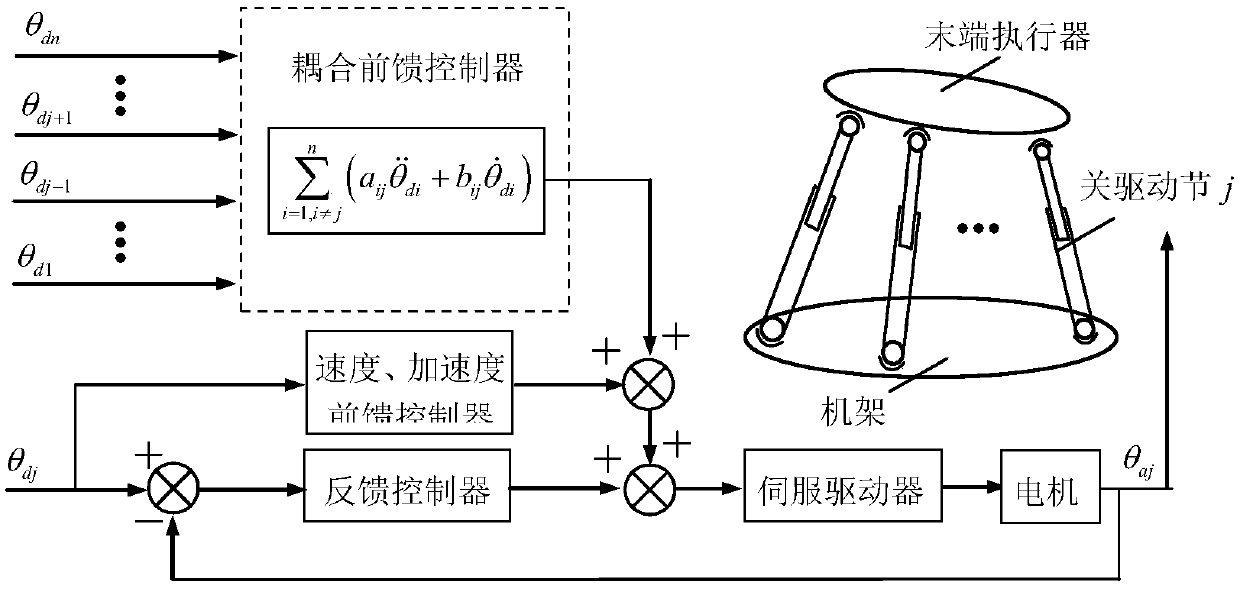
[0017] A kind of coupling feed-forward control method for robot of the present invention (such as figure 1 shown), including the following steps:
[0018] (a) each joint control motor of the robot is connected to a servo driver and each servo driver is respectively connected to the feed-forward controller and the feedback controller and the coupling feed-forward controller of each joint control motor, the feedback controller PID controller is adopted, and the feedforward controller adopts speed and acceleration feedforward controller;
[0019] The feed-forward controller is based on the expected position value θ of the motor connected t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More